楊淨 發自 凹非寺量子位 報道 | 公眾號 QbitAI機器人跳廣場舞,是一種什麼樣的畫面?搞錯了,再來!當機器人化身「輪滑小子」,前空翻、跳躍都不在話下~聽說一次可以跳出兩倍身高那麼
2021-06-03 17:19:33
楊淨 發自 凹非寺量子位 報道 | 公眾號 QbitAI
機器人跳廣場舞,是一種什麼樣的畫面?

搞錯了,再來!
當機器人化身「輪滑小子」,前空翻、跳躍都不在話下~

聽說一次可以跳出兩倍身高那麼高!(ps,這小子最低30釐米)
除此之外,對於那些輪滑常見地形,比如波浪、上下坡,甚至單腿過障礙,也完全駕輕就熟~

當然,輪滑小子真正的強項,還是要數平衡感。
即便是面對重拳出擊,它也絲毫不慌,就只是踉蹌了一下下。

嗯,真的只有一下下。
這麼一個炫酷小子到底是什麼來頭呢~
Ollie,你也可以叫它奧利。
奧利是騰訊Robotics X實驗室的新成員,也就是機器狗Jamoca和Max的兄dei!
不過,跟這兩位四足機器人不同的是,它只有兩條腿,也不完全是兩條腿。(手動狗頭)

當它開始送咖啡的時候,它的第三條腿就支稜起來了。
「三條腿」的輪滑小子
要實現「輪滑」,就需要奧利兼具輪式結構和腿部能力。
輪式結構負責速度,腿部來保持平衡。
奧利的單腿採用的並聯機構,能夠與身體形成五連桿結構。

而第三條腿尾巴的設計,一方面可以充當第三條腿,必要的時候支稜起來。
另一方面,可以為奧利提供額外的角動量,幫助完成高難度的動作。
就跟跳遠時,我們擺動的雙手差不多。
而除了硬體設施以外,奧利還涉及到了騰訊Robotics X實驗室的最新研究進展:非線性控制技術、全身動力學控制和軌跡規劃。
首先,非線性控制技術。
奧利在受干擾、遇到障礙的情況下,能夠大角度傾斜來保持自身的平衡性,控制器不受限於模型的可線性化區間內。

全身動力學控制。
這一技術,就像是給奧利裝上了「小腦」。採用最優化方法,來求得各關節力矩實現全身姿態調整。
在面對突如其來的巨大沖擊,如在空翻落地和遇到碰撞時,奧利能「以柔克剛」,順利抵抗外界干擾,保持平衡。
除了平衡能力之外,奧利還擁有軌跡規劃能力。
在完成這些動作時,奧利要動用自己的「大腦」,提前「想好」運動軌跡,即如何應用自身的形態和結構特點,最大程度地發揮關節電機效能來實現目標運動。
以空翻為例。
首先,奧利會以全身動力學模型為基礎,將整個空翻過程分解為起跳、飛行、落地三個階段。
然後通過優化手段得到完成整個運動的關節電機位置、速度和關節力矩的參考值序列。
目前,奧利還處於研發階段。
後續,實驗室將基於輪腿式機器人平臺的機動性特點,拓展平臺上感知、負載等各功能模組搭建,讓機器人具備更成熟、更豐富的能力。
相關文章

楊淨 發自 凹非寺量子位 報道 | 公眾號 QbitAI機器人跳廣場舞,是一種什麼樣的畫面?搞錯了,再來!當機器人化身「輪滑小子」,前空翻、跳躍都不在話下~聽說一次可以跳出兩倍身高那麼
2021-06-03 17:19:33
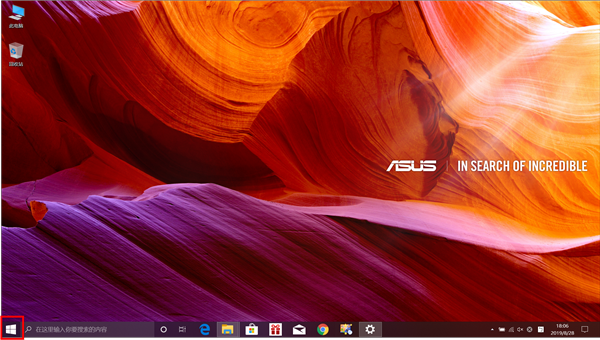
Win10華碩計算機如何保留檔案重置系統?我們的電腦很長,垃圾檔案越多,垃圾片段越多,軟體越多,也更多,這導致我們的電腦變長,特別困難,所以有必要重置系統。解決這些問題。但是計算機
2021-06-03 17:19:19

自從華為釋出鴻蒙系統後,「鴻蒙」二字已經刷屏網際網路,而在鴻蒙釋出會上,華為消費者業務CEO餘承東已經給出了華為各個機型的升級時間段,令人遺憾的是榮耀手機並不在名單之中,這
2021-06-03 17:19:04
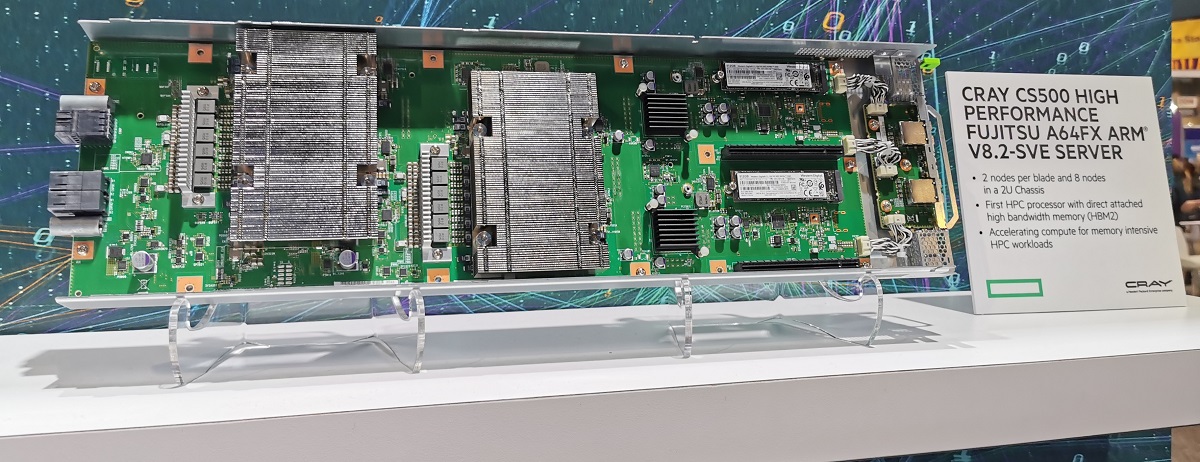
近十年來,Arm整個生態體系有了飛速的發展。這得益於智慧手機的普及,幾乎所有人都知道了Arm的存在。事實上更大的變革來自其他方面,比如桌面平臺、伺服器和超算領域。更接近於人
2021-06-03 17:18:52
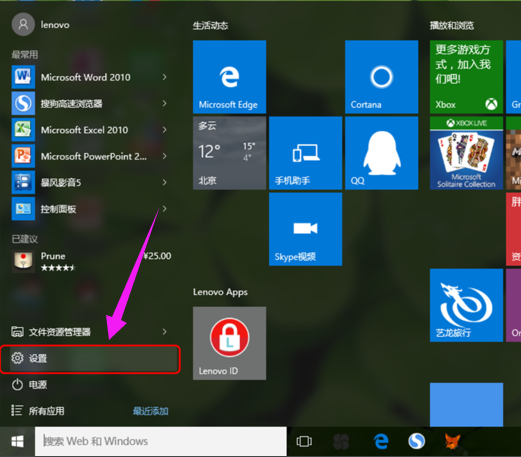
許多使用者將為他們的安全或重要資訊設定。啟動密碼防止別人使用操作,但是每次開機都需要輸入密碼登入,很繁瑣,那麼這個win10啟動密碼登入想取消掉有沒有方法?來看下具體的步驟
2021-06-03 17:18:41
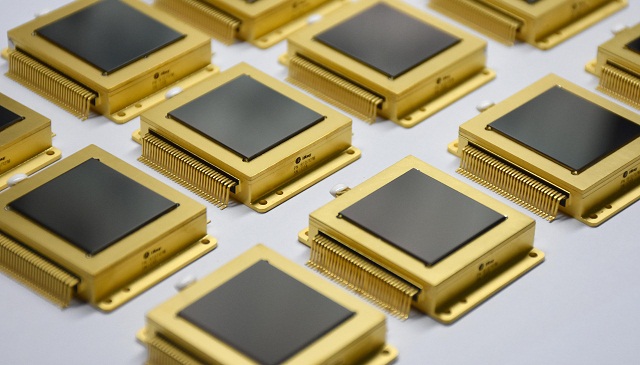
因為眾所周知的原因,越來越多的讀者開始重視起中國晶片產業的發展。而國內半導體領域也不負眾望,從2019年至今宣佈了多個好訊息。日前,中國企業又在一類晶片上實現突破,更實現了
2021-06-03 17:18:23