賈浩楠 發自 凹非寺量子位 報道 | 公眾號 QbitAI大洋兩岸的自動駕駛競速,出現技術標準層面的新變數。在剛剛更新的自動駕駛全球通用SAE分級標準中,增加了遠端駕駛相關定義,並且
2021-06-04 11:05:09
賈浩楠 發自 凹非寺量子位 報道 | 公眾號 QbitAI
大洋兩岸的自動駕駛競速,出現技術標準層面的新變數。
在剛剛更新的自動駕駛全球通用SAE分級標準中,增加了遠端駕駛相關定義,並且刪除L4、L5級別中「不需要干預」的說法。
通俗的講,就是熟悉的5G雲代駕。
這意味著,全球通用的自動駕駛分級標準,首次承認了5G雲代駕在自動駕駛中的合理地位。

這也意味著,一直以來以單車智慧路線來評價自動駕駛進展的唯一標準,被打破。
之前無論是Waymo,還是特斯拉,都是單車智慧為核心標準的受益者。
而更多中國玩家,以百度Apollo為代表,在雲方案、車路協同等方向的努力,得到了明確認證。

見微知著,從「離經叛道」到成為新標準裡的旗艦代表,自動駕駛江湖也在傳出新的疑問:
中國正在超越美國?百度Apollo正在超越Waymo?
自動駕駛「球標」更新了什麼?
SAE,全稱是國際自動機工程師學會(舊名美國自動機工程師學會),是一個全球技術學會,有14多萬會員。致力於航空航天、汽車行業技術標準。
SAE最早於2014年就制定了自定駕駛級別分類,首次提出了L0-L5級的分級方法。隨後這一套標準在全球範圍傳播開,如今已是全球學界、車廠、消費者通用的標準,堪稱「球標」。
我國於今年開始實行的《汽車駕駛自動化分級》,也沿用了SAE L0-L5的分級方法。

在剛剛更新過的SAE自動駕駛標準中,最重要的有兩點。
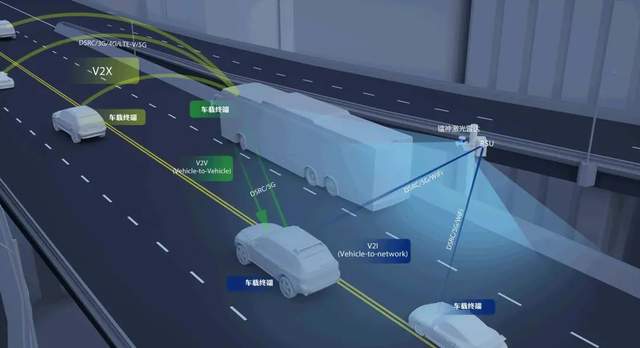
一是首次定義了遠端駕駛(remote driving)概念。
Real-time performance of part or all of the DDT and/or DDT fallback (including, real-time braking, steering, acceleration, and transmission shifting), by a remote driver.
遠端駕駛是指,部分或全部的DDT(動態駕駛任務)或緊急接管行為(包括實時剎車、轉向、加速和變速器換擋)的實時操作,都由遠端駕駛員完成。
說白了就是「5G雲代駕」幫助ADS處理複雜的道路情況。
這也是「雲代駕」這種方式首次被國際通用標準承認,雲代駕相關係統、技術,和AI演算法一樣,都是自動駕駛可用的技術路徑。
相應的,新SAE檔案還定義了相關的遠端協助、遠端預備接管使用者等等概念。

其中,在遠端預備接管使用者(REMOTE FALLBACK-READY USER)定義中,特別強調這名不在車上的遠端接管員,針對的是L3級別車輛。
為什 麼單單是L3?
這就涉及到這次更新中的另一大重點:釐清輔助和自動駕駛的區別,以及明確高階自動駕駛也不意味「全知全能」。
在新的分級標準中,L1、L2要求駕駛員始終執行駕駛任務,被歸為「駕駛員輔助」。
而L3及以上的自動駕駛,基本條件是啟用ADS後,全部駕駛任務都由系統來執行。區別在於適用範圍和接管條件。

△圖源:北京市高級別自動駕駛示範區
L3的區別於高階自動駕駛的最大特徵是ADS工作過程中,駕駛員或「雲代駕」需要待命響應系統干預請求。
而L4和L5的則由系統後備自主處理特殊情況,只不過L4的適用範圍有限。
儘管L4、L5「不期望使用者干預」,但在新定義中,卻刪掉了「使用者不需要接受干預請求」的說法。

△舊版

△新版
可見,從2018年至今,儘管不少廠家宣稱自己L4,甚至「完全自動駕駛」,但SAE認為,技術進步並未達到當時預期,即使高階自動駕駛,仍然不能高枕無憂地說「使用者不需要干預」。
更不要說如今普遍L2的情況。所以,將「雲代駕」相關技術納入標準,合情合理。
而近年頻發的自動駕駛系統主動事故,也印證了SAE的判斷。
為何更新?
先從一則備受關注的事故說起。
就在剛剛過去的5月,全球自動駕駛技術「頭雁」Waymo,在落地的亞利桑那州,出了一場導致交通擁堵的事件。
因道路施工,丁字路口的右側車道被雪糕筒隔開,而Waymo無人車遇見路障後直接在路口中間停了幾分鐘。
最近,全球無人駕駛頭部玩家Waymo被爆失控,其無人駕駛出租車在施工區域4次故障停車,2次脫離救援自行啟動,造成了交通堵塞,最終不得不由救援隊上車接管。#自動駕駛#無人駕駛#谷歌
你以為這就完了?

幾分鐘停滯還不至於造成大擁堵,但Waymo技術路線的缺陷,卻導致問題排除過程無比曲折。
Waymo本來有一套遠端後備,而且也是由人控制的,但這套系統卻不是實時「雲代駕」,側重排程,出問題後給出新的路線規劃或行駛建議,再上傳給車輛。
車輛原地「不知所措」幾分鐘後,Waymo的遠端支援「趕到」,但這讓車輛行為更加詭異,轉過彎,最後又在雪糕筒前停了下來。

之後,Waymo派出人工解決問題,但車輛又突然決定「靠自己」,幾次啟動挪車,情況卻越來越糟,最後還不明原因上了鎖,導致工作人員光上車就花了很久。
福布斯分析認為,Waymo的AI策略有問題,被卡—等救援—靠自己—被卡—再等救援,演算法邊界條件不清晰,陷入死迴圈。
就這樣,因為ADS無法處理雪糕筒,主幹道搞成了停車場。
這次事件 ,直接印證高階自動駕駛演算法,可能永遠都有解決不了的corner case。
而SAE在新標準中引入遠端駕駛概念,則清晰指明雲代駕+演算法是解決問題的高效途徑。
而有了通用標準認可,自動駕駛供應商們,不乏有一部分今後會認真考慮這一路線,快速推出體驗更好的L4級以上功能。

同時,新標準也會逐漸教育消費者,更加看重雲代駕的安全可靠。
所以自動駕駛商業化競賽,極有可能向有相關技術儲備的玩家傾斜。
目前,在「5G雲代駕」技術上有儲備的,中國代表是百度Apollo,美國代表…暫時還沒有。
百度Apollo走的就是結合中國實際的AI老司機+前裝量產車+車路協同+5G雲代駕的綜合技術路線。

單車智慧不可缺少,5G雲代駕強力輔助。
就比如Waymo遇到的施工、交通管制情況。按理說應借對向車道通行。但是,對於一個開發團隊來說,部署主動違規的演算法合適嗎?
所以,這些場景的博弈對現階段AI來說還是太困難。因此5G雲代駕協助成為了一個高效的備選途徑。
百度Apollo的車+路+圖+雲綜合方案,目前毫無疑問比單車智慧更安全可靠,使用者體驗也會更「絲滑」,因此滿足剷平落地和規模化的前提條件。
Apollo的商業化,既有向量產車釋放L4功能,也有直接用在Robotaxi上的商業化運營。
所以「單車智慧+雲代駕」路線,得到國際標準認可是技術和商業發展趨勢的必然。
新標準利好中國玩家?
雲代駕進入通用標準,最直接的結果,就是自動駕駛全球格局,出現變數。
因為,5G雲代駕,來自中國的玩家,既有先天優勢,又有技術儲備。
先天優勢不用說,據日前工信部公開資料顯示,目前我國建成的5G基站數量達到81.9萬個,佔全球5G基站建設總數的70%以上,已經覆蓋到了全國所有地級以上的城市。

而同一時刻,美國5G基站的建設數量不足10萬,終端連線數無準確統計。
基礎設施條件,中國比美國優異得多,而且這個差距,美國短期難以追上。
即使美國自動駕駛公司有強烈需求,憑一己之力也無法推動全社會層面的5G建設。
此外,百度Apollo的提前佈局,其實是對L3及以上的高階自動駕駛更加清醒的認識。
而這套方案自身的多冗餘、安全性又影響了自動駕駛通用標準的制定。
這一點才是SAE更新表象背後值得深究的關鍵。

L4、L5是未來,沒人有異議。
但實現的路徑,卻出現了兩種模式:單車智慧、大交通協同。
江湖對於這兩條路線的爭論也從未停過。
Waymo、特斯拉代表單車智慧,掀起了全球對自動駕駛的狂熱追捧。但繁榮之下,是頻繁出現的ADS主動安全事故。
此前特斯拉法務負責人在向美國監管部門提供的報告中,也承認FSD其實只是L2水平。
所以,車+路+圖+雲配合的綜合方案,「責無旁貸」扛過大旗。
在這套方案中,5G基礎是國家層面戰略,而車路協同、高精地圖繪製也需要整個社會層面的規劃執行。

中國不必多說,不光北京上海這樣的一線城市在探索車路協同基礎設施規劃建設,三大網路運營商、華為、商湯等等也在多地建起了V2X驗證演示基地,政策、准入等等都不會是「攔路虎」角色。
比如百度在重慶永川西部的自動駕駛開放測試基地,及四川成都高新區5G智慧城智慧駕駛項目等等。
而中國的優勢,對於美國「特殊國情」來說卻困難重重。
5G建設落後是一方面,在車路協同技術標準上,每個州都有自己的規則和態度,自動駕駛公司需要「各個擊破」,收集的資料也不一定能通用。
這也是類似Waymo這樣的美國玩家演算法遇到瓶頸,卻難以轉向的原因。

所以新標準出臺,與其說是對未來自動駕駛發展方向的指引,不如說是基於現狀的一種肯定。
自動駕駛的競速,來到了一個新關口。
更好的自動駕駛技術迭代,匹配更好的基礎設施,帶來更好的自動駕駛體驗,推動更快的商業落地,會進一步加速自動駕駛從夢想成為所有人觸手可及的現實。
中國正在直道超車,Apollo有比Waymo更快的加速度?
至少現在,是時候提出這個問題了。
相關文章
賈浩楠 發自 凹非寺量子位 報道 | 公眾號 QbitAI大洋兩岸的自動駕駛競速,出現技術標準層面的新變數。在剛剛更新的自動駕駛全球通用SAE分級標準中,增加了遠端駕駛相關定義,並且
2021-06-04 11:05:09

出品|開源中國文|Travis鑑於如今有越來越過有國家背景支援的黑客團體和其他各類黑客團體或個人的網路攻擊數量不斷增加,微軟一直在大力投資,擴大其網路安全能力。上個月,微軟釋
2021-06-04 11:04:57
拋開外界的一切因素,三星手機本身的實力並不弱,甚至可以說力壓眾多安卓旗艦手機,這也是實力的象徵。但結合如今市場來看,三星手機的壓力並不小,甚至無法面對國產手機的機海戰術,所
2021-06-04 11:04:14

618 購物節即將來臨,有不少朋友不知道該在購物節這個時候買些什麼東西?不如考慮給自己買一臺掃拖機器人,為日常家務減減負。石頭作為掃拖機器人行業領先品牌,在今年推出了他們新
2021-06-04 10:45:54

如果你想問前端最值得學習的框架是什麼,我一定會毫不猶豫地告訴你是Vue。無論你是技術小白還是前端工程師,Vue的重要性自不必多說。從首個Commit的提交到破繭重生的Vue3、Vite
2021-06-04 10:45:45

作為iGame的系統級產品,iGame M600幻境之眼發售之初就依靠炫酷的外觀,出色的效能表現,完善的售後體驗等被消費者喜愛。如今,在七彩虹正式釋出GeForce RTX 3080 Ti&3070 Ti系
2021-06-04 10:44:18