把一噸水從一個地方輸送到另一個地方,我們可以想出很多種方法,但如果我們需要精準移動幾滴指定的小水珠呢?
這涉及到一門技藝叫做微流控輸運,顧名思義,即一種微尺度下的流體輸運方法。對流動液滴精準操控,在化學合成分析、藥物篩選、細胞培養等領域用途廣泛,對許多學科實驗來講不可或缺。
迄今為止,液相操作主要依靠具有特定形態或化學成分的固體表面來打破固、液、氣三相接觸線的不對稱性,這種方法通常效率低,可控性有限,隨著技術升級,近年來基於外界刺激(如光場、電場、熱場)的智慧液體操縱策略得到了廣泛應用,但操作方法卻不夠簡便。
還有沒有更好的解決方案?很多科學團隊都在不斷探索。
(來源:Cell Reports Physical Science)
如今,來自香港城市大學和中國科學院的科研人員聯合設計了一種新裝置,他們使用一個具有極親水錶面的小鐵珠,發明出了仿生磁驅動液體操作微機器人 Hydrobot,它可以在任意路徑上驅動液滴移動,速度最高可達 2 米/秒(2000 體長/秒),隨著小鐵珠表面積的增加,Hydrobot 可以操縱更多的水。
這一策略還打破了空間限制,允許液滴沿三維 360° 圓移動,實現在任何坡度爬坡或下坡,未來其應用場景包括清潔難以到達的微環境或用來運送微物質。
圖|Hydrobot 跟隨外部磁鐵控制,攜帶液滴移動或停止
(來源:Cell Reports Physical Science)
相關研究論文以「Bioinspired magnetically driven liquid manipulation as microrobot」為題,線上發表已經於 6 月 3 日發表在《細胞報告-物理科學》(Cell Reports Physical Science)雜誌上。
(來源:Cell Reports Physical Science)
論文的第一作者、香港城市大學生物醫學工程系的博士後研究員 Yifan Si 表示:「Hydrobot 的設計靈感來自在荷葉上蹦蹦跳跳的小魚,魚鱗具有高度的親水性,能緊緊地粘附水滴,特別是在疏水錶面。受這種自然現象啟發,我們開發了 Hydrobot,其所涉及的材料很容易獲取,能為軟機器人的設計提供全新的思路。」
業界對於移動小液滴這件事,一直面臨著速度、體積和空間三方面的挑戰。
首先,很難用較高的速度(每秒幾米)精確操縱液體運動,更具挑戰性的是,隨機停止或移動液滴;同時,也難以在三維空間中實現液體操縱;此外,大多數的液體操縱研究都是基於空氣中的超疏水錶面,如何在其他基質或環境中擴展和實現液體操縱一直是業界關注的問題。
那麼,如何攻克這些挑戰?正如論文作者所說,靈感來自超親水性魚類能夠將水從超疏水性荷葉中帶走的自然現象。
通過利用內部超親水鐵珠(SIB)與液體之間的粘附力,在外加磁場的引導下,液滴在超疏水錶面上移動速度可達 2 米/秒(接近每秒 2000 體長),並且可以根據需要隨時停止。Hydrobot 可以像毫米級的軟機器人一樣在狹窄的空間內遊走,完成清潔、物體輸送和貨物釋放等複雜指令任務。
(來源:Cell Reports Physical Science)
就像荷葉上的水滴一樣,水滴能以近乎完美的球形出現在超高速疏水材料表面上,當 SIB 被放置在水滴中,會立即被水包圍,形成一個新的整體,在可移動外磁體的驅動下,系統積體電路可以隨磁體位置在二維 X-Y 平面上實現任意移動路線。
SIB 和水之間的高粘附力,可以提供足夠的效能來保持水滴高速運動,研究人員在 4 個數量級的速度範圍內測試了水滴特定的可操縱。理論上,這樣的磁驅動操縱策略的速度可以慢到 0 毫米 / 秒,中速可實現 6.3mm/s 的液滴操縱,在更快的情況下,研究人員在 0.01 秒內完成 2 釐米的移動,平均速度為 2000 毫米 / 秒。在論文中,研究人員表示,這還並不是能達到的最高速度。
(來源:Cell Reports Physical Science)
此外,研究人員還介紹了一個平臺,可以程式設計實現液滴在複雜狹窄空間中的快速準確移動,研究人員用水滴模擬了《吃豆人》遊戲,實現了多個液滴的連續聚合,在磁鐵的驅動下,液滴可以進行多次轉向、移動或停止動作,6 個彩色微滴在 16 秒內聚整合一個大的微滴,並能保持良好的可控性和運動性。
在這種基於固液粘附力的液滴操縱策略中,固體表面積很關鍵。換言之,SIB 的表面積對液體操縱的程度有決定性影響。
實驗結果發現,當液滴體積小於 50μl 時,兩個 SIB 帶著液滴均能實現 4 個量級(0.5~2000mm/s)的速度控制,當液滴體積大於 180μl 時,直徑為 1mm 的 SIB 將失去操縱液滴的能力,直徑為 2mm 的 SIB 在液體體積至 1000μl 時仍能在相對較快的速度範圍(0.5-5mm/s)內實現水滴操縱,而同時使用幾個 SIB,實驗中實現了對 3mL 水滴的移動操作。
(來源:Cell Reports Physical Science)
那麼,如何實現鐵珠和液滴的分離呢?道理其實也很簡單。當 SIB 與液滴之間的相對速度過大時,固液之間的粘性不足以使整個液滴獲得足夠的加速度,就可以使得 SIB 與液滴分離,液滴保持在原位(有時分離後液滴有一定的速度)。因此,快速加速是分離 SIB 鐵珠和液滴以獲得純液滴的有效方法。
此外,研究人員還測試了 Hydrobot 在三維空間的液體操縱能力,這需要克服另一項挑戰。
荷葉表面水滴可以自由滾動,具有表面自清潔特性,這稱為荷葉效應;而玫瑰花瓣在超疏水狀態下,微液滴可附著在其表面而不掉落,這稱為花瓣效應。
超疏水錶面的高運動性與高附著力之間存在著不可調和的矛盾,且由於重力的影響,液滴在三維超疏水錶面的可控操縱一直很難實現。
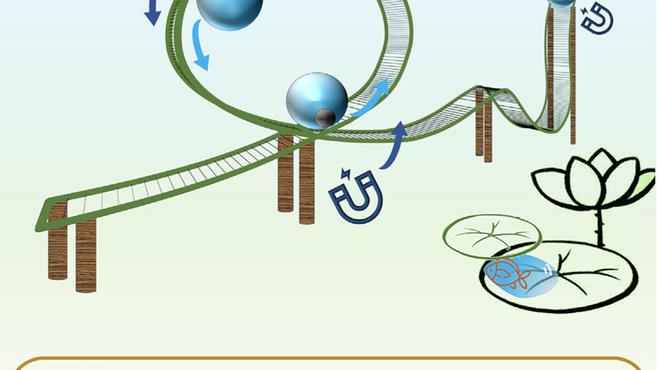
Hydrobot 磁驅動液體操縱策略實現了高運動性和高附著力的統一,以及在三維空間(包括爬坡和 360° 旋轉的圓形軌道)對水滴的可控操縱,經過多次旋轉後,液滴仍然附著在磁鐵表面。這一結果的根本原因是磁鐵對 SIB 的吸引力,而不是單純依靠固液粘附。通過這種機制,研究人員實現了對倒置超疏水玻片上水滴的可控操縱。
圖|在三維空間中移動液滴,完成了液滴 「過山車」 運動
(來源:Cell Reports Physical Science)
值得關注的是,Hydrobot 磁驅動策略不僅僅侷限於超疏水錶面,還可以將液體操縱推廣到所有類型的低阻環境中,比如在光滑的聚二甲基矽氧烷(PDMS)表面、平坦的超親水性聚對苯二甲酸乙二酯(PET)襯底上等,這就解決了操控環境的諸多限制問題。
速度的絕對控制和空間限制的突破,使得磁驅動液體操縱策略在毫米級軟機器人科學與工程領域具有良好的應用潛力。對於 Hydrobot 而言,水滴和內部 SIB 配合被視為一個整體。
Hydrobot 可以作為一個清潔機器人來吸附超疏水錶面狹窄角落的灰塵。在概念實驗中,研究人員用硫酸銅(CuSO4)模擬灰塵,將其放置在由積木構成的封閉狹窄的超疏水錶面上。
之後,可以用磁鐵操縱水滴機器人穿過一個由積木組成的隧道,然後找到有塵埃的地方。當 Hydrobot 接觸到 CuSO4 晶體時,它會迅速溶解,透明的 Hydrobot 逐漸變成藍色,超疏水基底則變得乾淨,不同區域的晶體可以一次溶解掉,最終,水滴機器人可以離開工作區,回到起點,整個清洗過程不會對超疏水錶面造成任何損壞。
(來源:Cell Reports Physical Science)
目前,無約束毫米級軟機器人最重要的用途之一是在人類無法到達的狹窄空間中捕獲/運輸和解除安裝微小裝置。此前已報道的大多數無約束毫米級軟機器人都具有良好的承載能力,然而,讓他們執行任務需要複雜的命令和扭曲,這在工程上是一個巨大的挑戰。
Hydrobot 可以利用表面張力附著低質量、低密度的物體,例如當機器人通過磁場移動到聚苯乙烯泡沫塑料顆粒上時,這些泡沫顆粒可以立即附著在 Hydrobot 液體表面,然後跟隨 Hydrobot 的運動,繞過多個障礙物,最終到達目的地。
研究人員還為 Hydrobot 設計了一種新的 「解除安裝」 方式,例如通過完全揮發液體,液體和固體之間的粘附力消失,被 「搬運」 的物體就可以自然而然地放在指定位置上,更重要的是,延遲解除安裝可以通過調節環境溫度、水生物體積和相對溼度來實現。
如果一個 Hydrobot 機器人的承載能力有限,多個機器人一起工作,承載能力可以提高很多倍,並且還可以控制它們的運動路徑和形式。
研究人員在論文中表示,如何實現多個機器人的近距離協同操作,將是團隊下一個研究項目的重點,這或將是仿生微型機器人新興領域的一個重大進展,有望開拓出更加豐富的應用場景。
「Hydrobot 可能為軟機器人的未來設計提供一些新的想法。」 Yifan Si 說,他表示,目前大多數軟體微機器人都在使用固體材料,但它們的靈活再好,也不會像液體那樣靈活,液體天然具備有利屬性,比如改變形狀和蒸發的能力。通過更多的研究,這些特性可以使 Hydrobot 更加通用。」
https://www.cell.com/cell-reports-physical-science/fulltext/S2666-3864(21)00134-X?utm_source=EA
https://www.eurekalert.org/pub_releases/2021-06/cp-wdb052621.php
https://www.dropbox.com/sh/bvbiji6c61s14lv/AADWsGY-xoPs3a_wTWs677GKa?dl=0