隨著自動駕駛技術在不同場景下的持續落地,目標檢測作為其中的一項核心模組,對檢測演算法的精度和穩定性要求越來越高。近日,在國際機器人技術與自動化會議(ICRA 2021)舉辦的第四
2021-06-23 18:03:45
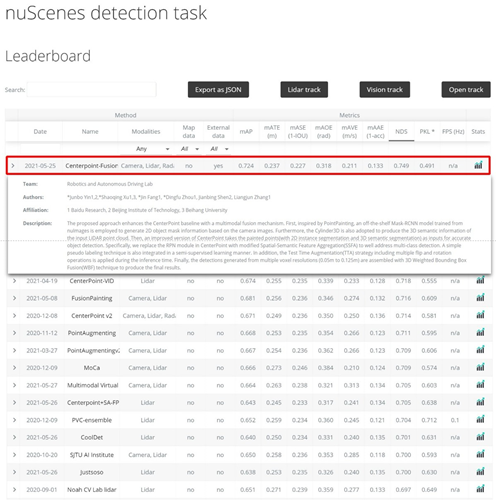
隨著自動駕駛技術在不同場景下的持續落地,目標檢測作為其中的一項核心模組,對檢測演算法的精度和穩定性要求越來越高。近日,在國際機器人技術與自動化會議(ICRA 2021)舉辦的第四屆nuScenes三維目標檢測挑戰賽中,來自百度研究院的機器人與自動駕駛實驗室(RAL)團隊在三維物體檢測任務的多項評價指標中榮獲第一,並將關鍵指標nuScenes Detection Score (NDS)從上一屆的71.4%提升至74.9%,重新整理了三維目標檢測比賽成績。

ICRA2021 nuScenes三維物體檢測挑戰賽官方排行榜
第四屆nuScenes目標檢測挑戰賽吸引了來自全球各地的多支參賽隊伍,不僅有百度、華為、滴滴等知名企業,還涵蓋了德克薩斯大學奧斯汀分校、上海交通大學、中國科技大學、哈爾濱工程大學等國內外重點高校。
本屆挑戰賽使用的nuScenes[1]資料集是自動駕駛目標檢測領域中最流行的公開資料集之一,集成了多種感測器(如相機,LiDAR, Radar等),提供了包含二維、三維物體標註、點雲分割、高精地圖等豐富的標註資訊。資料集整體共包含1000個場景、140萬幀影象、39萬幀鐳射雷達點雲資料、23個物體類別、140萬個三維標註框,資料規模和難度遠超之前的自動駕駛資料集KITTI。
百度研究院的機器人與自動駕駛實驗室(RAL)團隊在比賽中提出了一種多模態和多工的資訊融合框架FusionPainting[3] ,並且結合多模型融合等技術,推出了CenterPoint-Fusion的技術方案,將評價的關鍵指標NDS從上一屆冠軍的71.4%提升至74.9%,全類平均正確率(mean Average Precision)從上一屆冠軍的67.1%提升至72.4%。憑藉本次挑戰賽中多個評測指標第一的優異成績,百度在自動駕駛領域的技術實力再次彰顯。
CenterPoint-Fusion演算法優勢何在?
鐳射雷達(LiDAR)可以直接以三維點雲的形式提供周圍場景的深度資訊,因此廣泛的應用於自動駕駛的感知模組中。但是相比於影象資料,鐳射點雲具有密度稀疏,紋理資訊不豐富的缺點,因此在檢測任務中對於物體的類別分辨往往不準確。
利用相機和Lidar之間的標定參數,PointPainting[2]將影象的語義資訊附加到點雲上,再利用融合的點雲資訊進行物體檢測,能有效的提升檢測的精度。但是由於影象分割器的特徵圖尺寸大小的限制,分割結果在物體的邊界上有模糊效應,再反投影到3D點雲上時會造成物體邊界的點雲類別資訊不準確,從而影響最終檢測的效果。

基於多模態自適應融合的FusionPainting流程圖
相比於二維影象分割有物體邊界模糊的缺點,直接在三維點雲上進行分割卻能得到清晰的物體邊界。為了有效的解決這種邊界模糊的問題,百度提出了融合二維影象分割與三維點雲分割結果的FusionPainting框架[3]。對於每一個三維點,既通過二維影象分割獲得語義資訊,又通過三維點雲分割獲得語義資訊,最終通過一個自適應的注意力模組來對兩種資訊進行有效的融合。融合後的點雲可以作為任何三維物體檢測器的輸入,從而最終得到三維物體檢測結果。
在此框架的基礎上,百度進一步添加了多模型融合、半監督學習、測試階段資料增強等技術,充分發揮多模態和多模型的作用,進一步提升了目標檢測的效果。

nuScene資料集三維物體檢測檢測效果示例,其中不同的顏色代表不同類別的物體
本次在nuScenes三維目標檢測挑戰賽中奪冠的百度研究院機器人與自動駕駛實驗室,在自動駕駛感知和機器人領域有著豐富的技術積累和成果輸出,研究成果發表在CVPR、ICCV、ECCV、NeurIPS、AAAI、ICRA 與IROS等頂級國際學術會議和《Science Robotics》,《IEEE T-PAMI》、《IEEE T-IP》、《IEEE T-ITS》、《SAGE IJRR》等頂級期刊上。
百度佈局自動駕駛以來,不僅在自動駕駛技術和智慧駕駛領域市場佔據了先發優勢,並通過持續深耕,在技術創新和應用落地上也取得了令人矚目的成就。在自動駕駛這場改變人類軌跡的長跑中,百度還將繼續技術創新,做這條道路上堅定的領跑者。
參考文獻:
[1] Caesar, Holger and Bankiti, Varun and Lang, Alex H and Vora, Sourabh and Liong, Venice Erin and Xu, Qiang and Krishnan, Anush and Pan, Yu and Baldan, Giancarlo and Beijbom, Oscar. nuscenes: A multimodal dataset for autonomous driving. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020: 11621-11631.
[2] Vora, Sourabh and Lang, Alex H and Helou, Bassam and Beijbom, Oscar. Pointpainting: Sequential fusion for 3d object detection. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 4604-4612.
[3] Shaoqing Xu , Dingfu Zhou, Jin Fang, Junbo Yin, Bin Zhou and Liangjun Zhang. FusionPainting: Multimodal Fusion with Adaptive Attention for 3D Object Detection. Accepted by IEEE International Conference on Intelligent Transportation Systems (ITSC), 2021.
相關文章
隨著自動駕駛技術在不同場景下的持續落地,目標檢測作為其中的一項核心模組,對檢測演算法的精度和穩定性要求越來越高。近日,在國際機器人技術與自動化會議(ICRA 2021)舉辦的第四
2021-06-23 18:03:45
多次我們的計算機遇到藍屏,紙箱等問題,有些使用者選擇重新載入系統,但在Win10系統恢復後,它總是提示記憶體不足的問題,然後重新安裝Win10。如何解決記憶體?接下來,小編會告訴你解決
2021-06-23 18:03:35

雖然現在二十多元的平價充電器質量已經非常優秀,但仍然有不少更廉價的山寨產品橫流於大街小巷,而它們帶來的安全風險不容小覷。這兩天,一個關於 #睡覺時充電器爆炸險失明# 的新
2021-06-23 18:03:01

當您使用計算機時,有時您會發現帶有藍色陰影的桌面圖示,影響體驗。如果您有任何使用者詢問是否有任何方法可以去?以下小編將告訴您桌面圖示如何具有藍色陰影以刪除操作。計算機
2021-06-23 18:02:26

經過漫長的征途,天問一號5月15日成功登陸火星,國人的航天熱情被再度點燃。無巧不成書,天極網極行天下第三期活動的目的地也選在了位於甘肅金昌的火星一號基地。借天問一號成功
2021-06-23 17:42:47

站長點評:第11代酷睿i5系列當中有多款產品,酷睿i5 11400F雖然效能不是最強的,但是從效能、價格、發熱等綜合來考查的話,可以當做是一個比較均衡的選擇。今天站長就給大家帶來一
2021-06-23 17:42:38