機器之心報道編輯:陳萍、小舟在 2021 年計算機視覺與模式識別大會上,特斯拉 AI 高階總監 Andrej Karpathy 分享了一些特斯拉在過去幾個月中所做的事情,會上 Karpath 闡明瞭特斯
2021-06-23 19:31:35
機器之心報道
編輯:陳萍、小舟
在 2021 年計算機視覺與模式識別大會上,特斯拉 AI 高階總監 Andrej Karpathy 分享了一些特斯拉在過去幾個月中所做的事情,會上 Karpath 闡明瞭特斯拉在自動駕駛領域的重要性,並介紹了該公司的最新超級計算機等相關內容。
在自動駕駛領域,感測器的問題一直分為視覺派和鐳射雷達派。特斯拉 CEO 伊隆 · 馬斯克是堅定的視覺派,他曾多次 diss 鐳射雷達,認為它「很荒唐,註定要失敗」。

近日,在 CVPR 2021 線上自動駕駛研討會(WAD)上,特斯拉人工智慧高階總監 Andrej Karpathy 發表了主題演講,揭祕了特斯拉如何訓練 100% 的純視覺自動駕駛神經網路。
在演講中,Karpathy 談到了特斯拉在過去幾個月中所做的一些事情。首先他闡明瞭特斯拉在自動駕駛領域的重要性,並指出:當前「社會交通方面狀況不佳」,指的是這些由金屬製成的車輛在人類的控制下以高動能快速行駛——或者就像他所描述的:受人肉(Meat computer use in today’s transportation)控制。
此外,Karpathy 還透露了該公司的最新超級計算機。該計算機允許汽車製造商放棄雷達和鐳射雷達等輔助裝置,完全依賴高質量的光學攝像機實現自動駕駛。
Karpathy 闡述了目前交通環境中「人類駕駛員」的幾個簡單事實:
人們通常以 80mph 的速度駕駛重量大約一噸的汽車,可能存在 250ms 的反應延遲,而駕駛員需要轉頭和使用後視鏡來檢視交通狀況,有時他們甚至不能注意力完全集中。此外,調查發現:
全球每天有約 3700 人死於車禍;交通運輸成本較高。
Karpathy 表示:「歸根結底是人本身並不擅長駕駛,會造成一些交通事故。我們希望實現交通自動化,並讓整個人類社會受益。」
他指出,使用計算機晶片代替人類駕駛在安全性和便利性方面都有很多好處:
同樣以 80mph 的速度為例,使用計算機晶片控制駕駛,反應延遲<<100 毫秒,可以進行 360 度的感知,並且「計算機駕駛員」在駕駛過程中是全神貫注的。因此,自動駕駛未來會減少交通事故,並大幅降低交通運輸成本。
特斯拉的獨特之處
Karpathy 進一步闡述了特斯拉在自動駕駛方面的獨特之處:「我們採取循序漸進的方法來實現自動駕駛。特別是我們已經擁有了使用 Autopilot 包的客戶和數百萬輛汽車,Autopilot 軟體一直在運行,並完善了一些保障安全的功能,當然也包括 Autopilot 功能。在我們為客戶提供安全和便利的同時,我們的團隊正在開發完全自動駕駛(Full Self-Driving,FSD)功能。」
Karpathy 在演講中播放了一段演示自動緊急制動的視訊。當司機開過一個十字路口時,一個行人突然出現了。汽車檢測到行人後,目標檢測啟動,猛踩剎車以避免碰撞。

下一個演示是一個交通管制警告的例子,該例子顯示司機分心了,他可能在看手機,沒有因為前面的紅綠燈變紅而剎車。而車子檢測到了紅燈,因此它發出警告聲,司機開始減速。

接下來的兩個視訊是踏板誤踩補救機制 (Pedal Misapplication Mitigation,PMM) 的示例。在第一個示例中,駕駛員正在停車並試圖轉彎。然而,他犯了一個錯誤踩下油門而不是剎車。此時自動駕駛系統啟動,檢測到行人,突然剎車。

Karpathy 展示的最後一個場景是另一個司機試圖停車。司機向右轉,以為在踩剎車然而他踩的是油門,此時系統啟動制動,阻止了事故的發生。

Karpathy 還展示了特斯拉在舊金山自動導航的另一個視訊,並指出他展示了所有的預測——你可以看到的線條和物體,表明系統也看到了相同的東西。
這些都說明計算機控制的自動駕駛能夠比人類駕駛員做得更好,Karpathy 說:「作為工程師,我們當然會推廣自動駕駛,對我們來說,零干預驅動實際上是相當常規的,尤其在人口稀少的地區。」
值得注意的是,特斯拉不同於其他自動駕駛公司,他們採用的是純視覺系統。
視覺 VS 雷達,該選哪一個
「這是一個在十字路口左轉的 Waymo,這個視訊為什麼這麼令人印象深刻?我想強調的一點是,儘管視覺和雷達兩種情況看起來是一樣的——有一輛車在十字路口左轉,但就係統的可擴展性而言,情況卻大不相同。」Karpathy說道。
所以,行業中很多競爭的方法都採用了這種鐳射雷達 + 高清地圖的方法。
Karpathy 解釋說,使用雷達的系統必須用鐳射雷達感測器預先繪製環境地圖,同時還要製作高清地圖。他們還必須插入所有的車道,紅綠燈,在測試時,車輛需要定位到地圖上,以便駕駛。
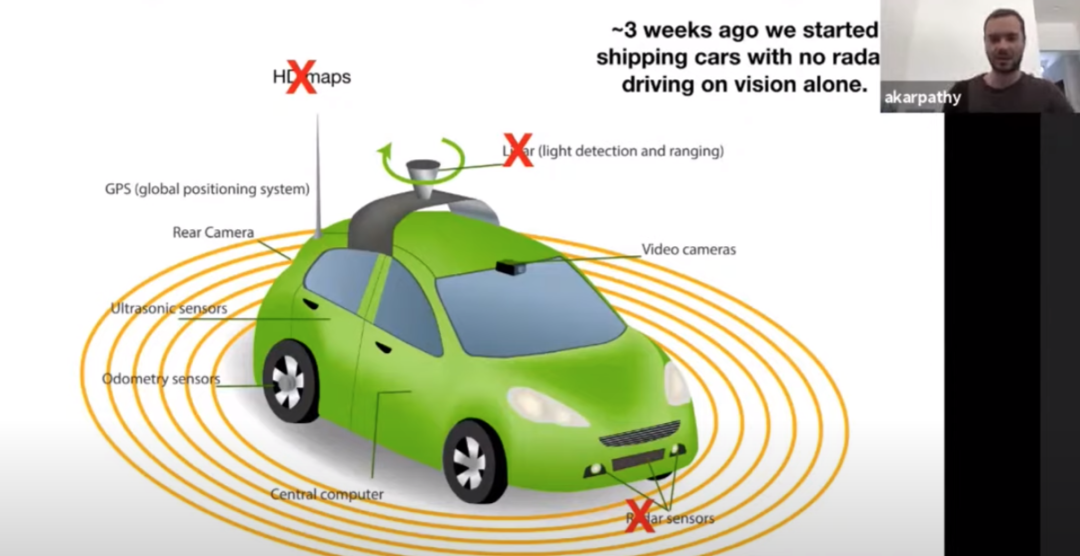
而特斯拉則不同,Lidar 和高清地圖都不用,專注以相機為主的純視覺感知方案:

雷達感測器已經廣泛地應用在很多乘用車和卡車當中,通過無線電波技術,即便在能見度差的情況下也能檢測快速接近的物體,是為汽車駕駛安全提供保障的感測器之一。但特斯拉公司表示北美市場的 Model 3 和 Model Y 車輛的輔助駕駛 AutoPilot 系統中,將放棄使用雷達感測器,轉而聚焦攝像頭視覺為中心的解決方案。他們將依靠攝像頭視覺系統和神經網路處理來實現「Autopilot、全自動駕駛(FSD)和某些主動安全功能。」
Karpathy 說:「我們採取的方法主要是基於視覺,依靠 8 個環繞車身並能夠覆蓋 360° 的攝像頭。所以我們第一次來到一個十字路口,我們必須弄清楚車道在哪裡,它們如何連線,交通燈在哪裡,哪些是相關的,什麼交通燈控制什麼車道,所有的事情都發生在當下,發生在那輛車上,我們之前並沒有高清地圖等資訊。」
Karpathy 表示這是一種更具可擴展性的方案,基於此他們需要一個能夠預測速度、加速度等資訊的神經網路,首先需要一個滿足以下條件的資料集:
包含數百萬視訊的大型資料集;經過預處理,帶有多種標籤的高質量資料集;該資料集要豐富多樣,包含一些邊緣樣例。
Karpathy 進一步介紹了特斯拉的資料引擎:
最終他們得到了一個包含一百萬條視訊,60 億物件標籤的資料集,該資料集後續還將繼續完善更新。
接下來,研究團隊需要在這個超大型資料集上構建一個神經網路。這個神經網路將是一個通用的視覺系統,原則上可以部署在任何需要的地方。這也是特斯拉研發團隊正在做的事情。
使用上述方案,特斯拉能夠規避「突然減速」問題和基於雷達的系統的訊號中斷,提供平穩的駕駛狀態。
Karpathy 解釋說,特斯拉在過去幾年裡構建的視覺系統非常好,比其他感測器都要好。攝像頭承擔了感知方面的大部分工作,現在特斯拉正在移除一些感測器,因為這些感測器正在成為不必要的輔助。
「三週前,我們開始運送完全沒有雷達的汽車。我們脫離了雷達,只靠視覺駕駛這些車。而我們這樣做的原因,正如伊隆在推特上所表達的,『當雷達和視覺不一致時,你相信哪一個?視覺的精確度要高得多,因此,與其進行感測器融合,不如在視覺方面加大投入。』」
在演講中,Karpathy 還展示了特斯拉完全自動駕駛(FSD)晶片:
此外,Karpathy 還講解了特斯拉的超級計算機叢集,也是特斯拉即將推出的新超級計算機 Dojo 的「先行版本」。特斯拉聲稱該新叢集具有一些相當瘋狂的參數,應該會使其成為全球第五的計算機:
720 個 80GB 8x A100 節點(共 5760 個 GPU);1.8 EFLOPS(720 節點 * 312 TFLOPS-FP16-A100 * 8 gpu / 節點);10 PB「熱層」NVME 儲存 @ 1.6 TBps;總交換容量為 640 Tbps。
相關文章
機器之心報道編輯:陳萍、小舟在 2021 年計算機視覺與模式識別大會上,特斯拉 AI 高階總監 Andrej Karpathy 分享了一些特斯拉在過去幾個月中所做的事情,會上 Karpath 闡明瞭特斯
2021-06-23 19:31:35

由於晶片短缺, 華為P50系列遲遲沒有釋出,這讓不少使用者十分擔心,華為Mate系列會不會在今年停更,而但根據中國證券報放出的訊息,華為供應鏈已經拿到Mate50系列手機設計方案,只不過
2021-06-23 19:30:33

在去年的WWDC上,蘋果宣佈,將其所有的Mac電腦從Intel晶片轉至Arm架構下的蘋果自研晶片,過渡時間為兩年。去年的11月,蘋果正式釋出了三款首批搭載了蘋果自研M1晶片的Mac電腦,分別是
2021-06-23 19:30:03

你的智慧手機中用的是什麼輸入法?一般手機出廠都有自帶的輸入法,很多人可能拿到手機後就直接開用,並沒有在意它,或者去額外下載一款輸入法。其實好用的輸入法是能大大提升用機效
2021-06-23 19:12:01

【科技犬】今日晚間,蘇寧易購釋出公告稱,蘇寧易購集團股份有限公司實際控制人、控股股東張近東及股東蘇寧電器集團有限公司正在籌劃涉及公司股份轉讓的重大事項。經公司申請,公
2021-06-23 19:11:33

隨著網際網路+概念和物聯網的發展,越來越多人選擇在自己的家中或是店鋪裡安裝攝像頭,不但能起到防盜的作用,還能實時檢視家中小孩高齡老人及店面實時情況,讓生活工作更安心。除
2021-06-23 19:11:01