【TechWeb】7月22日,特斯拉在北京南四環中路特斯拉體驗中心舉辦「T-talk」線下分享討論會。本次「T-talk」以FSD為主題展開,講師向參與者揭祕了特斯拉在自動駕駛領域所做的努
2021-07-26 03:01:05
【TechWeb】7月22日,特斯拉在北京南四環中路特斯拉體驗中心舉辦「T-talk」線下分享討論會。本次「T-talk」以FSD為主題展開,講師向參與者揭祕了特斯拉在自動駕駛領域所做的努力,以及如何以此「加速世界向可持續能源轉變」。
「T-talk」是特斯拉發起的線下活動,由官方定期邀請媒體及社會各界人士,一起討論行業現狀、技術發展,共同推進行業進步,特斯拉也藉此搭建起與媒體及公眾溝通的橋樑。通過本次活動,參與者們深入瞭解了特斯拉對完全自動駕駛的探索,並共同展望完全自動駕駛時代更美好的出行生活。

安全是底線:以消滅交通事故為目標
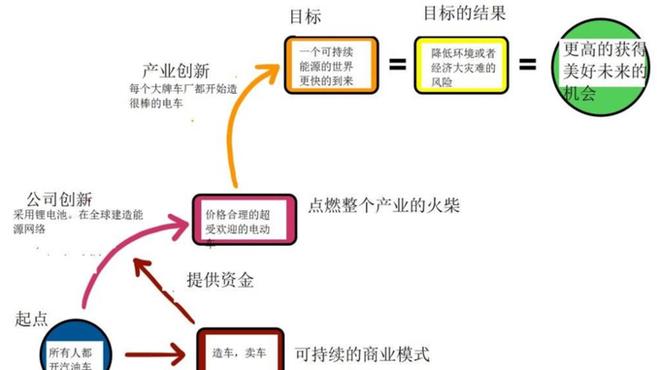
通過造好車、賣好車,形成可持續的商業模式,將盈利用於研發創新;而後以創新成果點燃整個行業的熱情,帶動更多廠商研發製造高品質的純電動智慧汽車,形成產業創新;最終讓可持續能源的世界加速到來,為人們創造更美好的生活。

調查顯示,全球每天有3萬餘人死於交通事故。對於「好車」的概念,或許每個人都略有不同,但是都必須基於相同的基礎之上,那就是安全。
被動安全方面,特斯拉車型有著車身結構帶來的先天安全優勢。由於沒有發動機,特斯拉車型前方自帶吸能潰縮區,能在意外中有效保護乘員;鋼鋁混合輕量車身、堅固的底盤防護、大量高強度鋼和超高強度鋼的應用,打造固若金湯的安全防護。
在最新的美國國家公路交通安全管理局(NHTSA)碰撞測試中,特斯拉全系車型均獲得五星碰撞安全評級。其中,Model 3不僅獲得NHTSA全五星安全評級、ENCAP全五星評級,還摘得了IIHS SAFETY PICK+頂級安全大獎。在美國政府的「新車評價項目」中,Model 3比其測試的任何車輛受傷概率都低。
在事故的預防方面,則有全系標配的主動安全配置守護。每輛特斯拉車型,均有側撞預警、盲點碰撞警報、前撞預警、速度限制警報、障礙物感應限速、自動緊急制動、車道偏離防避等功能。在此基礎上,特斯拉還提供主動巡航控制、輔助轉向、自動變道、輔助駕駛導航等功能,車輛預知風險、預判後,系統能夠自主實施轉向、制動等決策,儘量避免事故的發生。以Model 3為例,當在併入的臨近車道中探測到車輛時,Autopilot便會觸發側撞預防功能(轉向干預),並保障車輛自動轉向行駛到一個更安全的位置。
主動安全系統+Autopilot,帶來的安全性提升是立竿見影的。NHTSA公佈的最新資料顯示,在美國每行車674萬公里,平均會發生8.66次事故。而這個資料,在使用了Autopilot的特斯拉車主中僅為1次;沒有使用Autopilot但有主動安全功能參與的駕駛中,事故約為2次。也就是說,特斯拉的Autopilot讓行車安全水平達到平均水平的8.66倍。

特斯拉2021年第一季度車輛安全報告
當然,安全只是一個底線,對於交通,我們還需要解決很多問題,其中最亟待解決的就是「浪費」問題。每天,全世界有500多萬個小時被浪費在交通堵塞上,有1700平方公里的土地面積,因為人們用不到而被停泊的車輛白白佔用。
因此,特斯拉研發FSD,不僅希望讓交通事故將不復存在,也希望我們可以更高效地使用交通資源,極大地緩解擁堵和土地佔用問題。
FSD成長祕訣:硬體+軟體+資料
一個沒有交通事故和擁堵的世界,聽起來不太現實。不過,特斯拉以目前最接近量產、最現實、最能大範圍適配的自動駕駛技術,讓這個想象逐漸落地。
特斯拉的晶片已經經過3次迭代,目前最新的Full Self-Driving Computer上搭載了特斯拉自主研發的兩枚晶片,也就是Autopilot3.0硬體,效能比2.5版本晶片強大21倍。

不同晶片針對環境都擁有不同的指令演算法特徵,簡而言之,有自己的特長。AI晶片,在影象識別等領域有著獨特優勢,其計算方式為矩陣或vector的乘法、加法,配合一些除法、指數等演算法。而CPU則適合於不同領域的複雜演算法,比如計算機伺服器領域;GPU雖然也是針對影象渲染的演算法,但其特性不符合神經網路。
特斯拉研製的FSD晶片中,其中NNA(NPU)處理器即是為AI演算法而存在的。

注:
2017年8月,FSD晶片設計完成
2017年12月,第一次試驗晶片併成功
2018年4月,測試並改進晶片
2018年7月,獲得量產合格
2018年12月,裝置裝車並測試成功
2019年3月,Model S和Model X生產線安裝FSD晶片
2019年4月,Model 3生產線安裝FSD晶片
相較於HW2.5,FSD電腦將算力提升至了144TOPS,每秒處理的圖片速度提升至2300幀。

算力的大幅提升,目的在於處理海量的影象資訊,特斯拉的自動駕駛輔助系統之所以能夠快速迭代和提升體驗,就在於通過各類不常見但仍可能存在的「邊角案例」情況,再通過(神經網路)深度學習讓系統能夠處理越來越多的駕駛場景。
深度學習,簡單來說就是通過硬體模擬人類大腦神經網路系統學習機制的一種學習方式,類似於人們對於外界事物逐漸熟悉和學習的過程。特斯拉通過不斷輸入資料,人工或自動標註出正確「答案」,令其不斷自我「進化」,從而快速提供識別率,進而不斷覆蓋所有的駕駛場景。

每當車輛在遇到各類「邊角案例」時,也就是遇到一些比較「棘手」的駕駛場景,或駕駛員的操作與系統「預想」操作不一致時,車輛都會脫敏匿名將實際情況上傳給特斯拉雲端伺服器,通過龐大的集中算力進行深度學習以優化系統。當然,系統也為使用者提供了不上傳資料的選項,所有上傳至雲端的資料均為脫敏、匿名處理後的資料。
相比更加依賴車隊測試的企業,特斯拉FSD學習過程的優勢在於絕大部分資料是由真正行駛在路上的車輛收集的,只有小部分來自測試車隊,更加貼近車主日常駕駛場景,而這個資料正在呈指數級增長。
早在2020年4月,特斯拉啟用Autopilot的行駛里程就已經突破48億公里。專家預測,這個數字將在2021年超過80億公里。有機構粗略計算,如果使用者平均每天駕駛約一個小時(每輛車8個攝像頭),車隊每月大約會產生1.968 億個小時的視訊,這樣龐大且高質量的資料量,是全球任何車企都無法比擬的。
為了處理巨量駕駛資料,特斯拉將把針對自監督學習技術的研發提高到絕對優先順序。特斯拉啟動了一個代號為Dojo 的重大項目,它是一臺超強的訓練計算機,處理的資料不再停留在圖片層面,而是針對視訊類的資料,能夠以較低的成本實現演算法效能的指數級提升。
感知系統新思路:比雷達還要靈敏的視覺方案
自動駕駛系統,感測器得到的資料是一切的基礎,不過不同的感測器各有不同優劣勢。對於特斯拉而言,其實取締毫米波雷達是早晚的事。因為早在2019年的「自動駕駛大會」上,特斯拉就已經公佈了一些細節。

毫米波雷達(Radar)的優勢在於對距離、速度等資訊的判斷,不過通過演算法的優化,特斯拉已經能夠通過攝像頭實現該目的。

但特斯拉並沒有急於取消Radar,而是在此之前,通過Radar來判斷我們的視覺方案是否能夠準確得知距離、速度等資訊。

能夠替代Radar給出距離、速度等資訊還只是其中一個理由,另一個更關鍵的理由在於,雖然越多的感測器經過融合演算法後,能夠提供相對越全面的環境資訊,但問題是當不同感測器給出的資訊對決策來說是互相矛盾時,就會出現各類問題。
特斯拉經過實際測試和對比,通過純視覺方案不僅能夠提供與Radar一樣的資訊,並且還將體驗優化提升了很多。
在前車緊急制動的場景下,純視覺方案沒有出現Radar那種資訊中斷和誤判的情況,非常線性,從而能夠提供線性的制動決策,帶來更佳的使用體驗。

注:黃色線條代表毫米波雷達感知的距離、速度、加速度影象;藍色線條代表純視覺感測器的資料結果。
而在通過立交橋下的場景中,由於Radar的垂直解析度很低,所以容易導致系統誤判空中的物體為障礙物;而純視覺方案則完全不會出現該問題。

還有一種比較常見的情況就是對靜止物體的判斷。對於毫米波雷達來說,前方車輛停靠在路邊,導致識別較晚,在距離車輛110米時才感知到前方停有卡車。而純視覺方案在距離車輛180米的時候就已經識別了該車輛。

在經過技術推論、實際驗證等多個環節後,特斯拉純視覺方案的可行性已經得到了證明。對於特斯拉而言,無論是產品還是自動駕駛系統,規模化都是核心要素之一,在各類自動駕駛方案中,純視覺方案的適應性和潛在覆蓋駕駛場景都是最全面的。
今後,特斯拉會加快Dojo的建立,通過海量的算力和人工智慧自動標註技術,將處理資料的速度和能力再度提升一個臺階;HW4.0硬體也正在研發籌備中,未來,特斯拉的自動駕駛系統的能力,仍在高速進化。
相關文章
【TechWeb】7月22日,特斯拉在北京南四環中路特斯拉體驗中心舉辦「T-talk」線下分享討論會。本次「T-talk」以FSD為主題展開,講師向參與者揭祕了特斯拉在自動駕駛領域所做的努
2021-07-26 03:01:05

小米都捐了,該華為了吧?近來河南大雨,去年虧2.2億的鴻星爾克也拿出了5000萬馳援河南,像騰訊更是第一時間做出反應,包括阿里、拼夕夕以及快手和嗶哩嗶哩等等吧,有捐一億的有捐兩千
2021-07-26 03:00:48

華為已經官宣,將於7月29日釋出年度旗艦—華為P50系列,在延期了4個月之後(常規釋出日期是3月底),這款旗艦機終於要和我們見面了。iPhone13系列要在9月才會釋出,所以很多人就等著P50
2021-07-26 03:00:43

華為Mate40 Pro如今正處在一機難求的境況,其5G版本缺貨嚴重,只有4G版本還在供應。 作為華為下半年的旗艦之作,華為Mate40 Pro的起售價高達6499元。如今在供不應求的情況下,該機
2021-07-26 03:00:38

眾所周知,三星Galaxy Note系列一直是三星科技頂尖工藝的代表機型,其以高規格的品質,經典優雅的設計廣受好評。此前有傳言稱,因今年驍龍888的產能及發熱問題,三星將會取消Note系列
2021-07-26 03:00:33
很多使用者對vivo手機的態度都不是特別好,有很多使用者認為vivo旗下的產品都是低配高價,即使到現在也無法進行認可。因為前期的vivo X系列在市場中的口碑確實不夠出色,這也導致
2021-07-26 03:00:27