大資料文摘授權轉載自機器人大講堂 轉筆,使用筷子,盤核桃等這種「在一隻手內移動物體的動作」,我們稱之為 「手內操作(In-hand manipulation)」。在傳統機械手上,手內操作通常需
2021-06-17 03:01:37
大資料文摘授權轉載自機器人大講堂 轉筆,使用筷子,盤核桃等這種「在一隻手內移動物體的動作」,我們稱之為 「手內操作(In-hand manipulation)」。在傳統機械手上,手內操作通常需要精確的運動規劃和控制方可實現。 相較而言,軟體手能夠同未知的物體更好的互動,因此無需過多依賴精準的感測或複雜的控制,軟體抓手就可以實現一定的手內操作。來自哈佛大學微型機器人實驗室(Microrobotics Lab),RJ Wood教授團隊的研究者們研發了一款軟體抓手,並用較少的控制和感測資訊實現了較為穩健的手內操作,例如擰下瓶蓋,擺放點心等。該研究發表於著名機器人期刊《IEEE Robotics and Automation Letters》。 另外,近日該團隊還放出了開源的軟體機器人模擬軟體SoMo,模擬軟體機器人和環境物體互動的場景。 軟體抓手更容易實現手內操作 我們或許擁有世界上最靈巧的「機構」,我們的雙手。通過簡單的訓練,我們可以做出使用筷子,轉筆等一系列複雜的動作。通過專業的訓練,魔術師甚至可以掌握讓人眼花繚亂的卡牌技巧。 圖3. 人手的靈活程度無與倫比 科學家們希望能用機械手來複現人手的功能,從而讓機器人能代替人進行復雜的操作,或是能作為假肢幫助肢體缺陷的人。生活中的物體種類多樣,千變萬化,為了實現機械手的手內操作,剛性的機械手需要儘可能多的感知資訊和精妙的控制方可實現。 軟體抓手能夠很好的適應不同的物體和未知的環境,抓取形狀和大小各異的物體。來自於哈佛大學微型機器人團隊的研究者們設計了一款四指軟體抓手,並復現了一些日常生活中常見的手內操作動作,如擰下瓶蓋,擺放食品位置和抓取過程中提供重力補償等。該研究發表於著名機器人期刊《IEEE機器人和自動化快報(IEEE Robotics and AutomationLetters)》。 我們先來看幾個軟體抓手的手內操作展示,感興趣的讀者可以在文末找到完整的視訊和論文資訊。值得注意的是,研究者稱,在這些展示中,物體具體的姿態,尺寸或者重量屬性都沒有明確的給出。 擰瓶蓋是日常生活中常見的動作之一,通過簡單的運動規劃,軟體抓手可以擰下瓶蓋,並來回晃動。 圖5. 軟體手擰瓶蓋 除了較硬的瓶蓋,軟體抓手可輕柔地抓取操作一些脆弱的物體,例如水果,蔬菜,或者是蛋糕點心。研究者們展示了軟體手可以旋轉並調整蛋糕的姿態,然後將它放入蛋糕盒內,方便取用。 圖6. 調整蛋糕方向 無需過多的感知和控制,軟體抓手可以對西蘭花這種形狀及其不規則的物體進行平移和旋轉的手內操作。 圖7. 軟體手對西蘭花進行操作 研究者還展示了軟體抓手帶有重力補償的手內操作。由於軟手指的剛度較低,導致在水平旋轉比較重的物體時會出現偏移。根據手的朝向和物體的重量,可以計算出一個簡單的氣壓偏移值補償到軟體手指內,從而使軟體抓手成功完成水平方向的旋轉動作。 圖8. 帶重力補償的手內旋轉操作 下圖對比很明顯,在無重力補償的旋轉時,物體很容易就會掉出,而帶重力補償的則不會。 圖9. 有無重力補償對比 值得一提,針對類似 「手內操作「 的應用場景,哈佛大學的研究者基於python3.6開發了軟體機器人模擬軟體SoMo,下載連結為:github.com/GrauleM/somo 。該軟體可以讓使用者快速簡單的構建軟體機器人模型,同時也可以模擬出軟體機器人和環境物體的互動。 圖10.用於軟體機器人模擬的開源軟體SOMO 圖11.軟體機器人模擬展示 軟體抓手和手內操作 該研究集中於三個日常生活中常見的動作作為主要目標來設計軟體抓手,即,沿著一個軸(z軸)的旋轉和沿著一個平面內的兩個方向(X和Y方向)平移。這三個基本運動將作為軟體抓手的基本運動單元,來幫助軟體抓手實現手內操作。 圖12.軟體抓手的三個基本運動單元 研究者以實現上述三種基本動作為目標,設計了靈巧軟手指。為了能夠實現物體的旋轉和平移,手指要可以向掌心彎曲,同時也要能沿著抓握軸的方向左右移動。因此研究者設計了兩個單獨的氣腔。除去具備靈活程度,手指也要有足夠的強度來支援運動。軟手指的材料採用45 邵氏A硬度的矽膠來製作,指尖部分採用30Shore-00硬度的矽膠來製作。其餘部分3d列印。 圖13.軟手指結構設計和製造 研究者測試了手指的一些基本參數和效能,從而知曉手指的運動範圍,強度,以及所需要的氣壓大小。如圖所示,軟體手指可以向內彎曲大約80mm,左右彎曲各30mm。另外,手指彎曲最大氣壓約為240kPa,最大彎曲曲率半徑為22mm左右,最大彎曲力(阻擋力)為2.3N,側向力為1.2N。 圖14.軟體手指的效能參數測試結果 為了測試手內操作的表現,研究者用幾個典型物體來檢驗之前提到的三種基本運動單元。這些物體包括一大一小的圓柱體,硬質盒子和泡沫盒子,大小蛋糕,以及西蘭花(110mm直徑尺寸)。結論得出,較小的物體的手內操作會導致較大的誤差,這可能是由於手指彎曲角度大了會導致末端位置精度差。此外,物體的平移和物體大小相關性較小,而純旋轉和物體的形狀有很大關係。 圖15.軟體抓手的手內操作實驗 結語 研究者們設計的這款四指軟體抓手靈巧好用,使用簡單的控制就可以實現三個基本運動(平面內的平移和旋轉),這三種運動也可以直接組合使用。該研究證實了軟體抓手能夠在不知道物體的精確位置、形狀或大小的情況下,對脆弱的物體進行穩定的手動操作。 研究者指出,在未來的工作中,會引入軟體手掌來提高手內操作的效能。同時也會引入帶有接觸力反饋的閉環控制。他們也指出,這種安全可靠的軟體抓手在諸如家庭輔助機器人的場景中有很大的應用潛力。 圖16.軟體機器人灌籃模擬 文章資訊: Abondance,S., Teeple, C. B., & Wood, R. J. (2020). A dexterous soft robotic hand fordelicate in-hand manipulation. IEEE Robotics and Automation Letters, 5(4),5502-5509. https://ieeexplore.ieee.org/document/9134855


 圖4. 仿生機械手Shadow Hands 單手玩魔方
圖4. 仿生機械手Shadow Hands 單手玩魔方











相關文章

大資料文摘授權轉載自機器人大講堂 轉筆,使用筷子,盤核桃等這種「在一隻手內移動物體的動作」,我們稱之為 「手內操作(In-hand manipulation)」。在傳統機械手上,手內操作通常需
2021-06-17 03:01:37
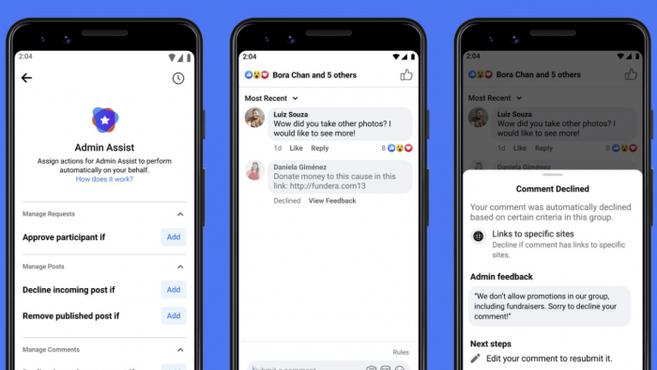
Facebook正在推出一套新的工具,以幫助組管理員掌握他們的社群,其中包括一個由AI驅動的功能,Facebook說它可以識別在評論中發生的有爭議的或不健康的對話。這個工具被稱為"衝突
2021-06-17 03:01:19

618來了,很多手機廠商為了衝擊銷量榜,旗下產品紛紛降價了,而且有的價效比很高,現在手機廠商競爭激烈,給消費者帶來了很多好處,特別是小米主打的價效比手機,拉低了手機價格,線上手機
2021-06-17 03:01:05
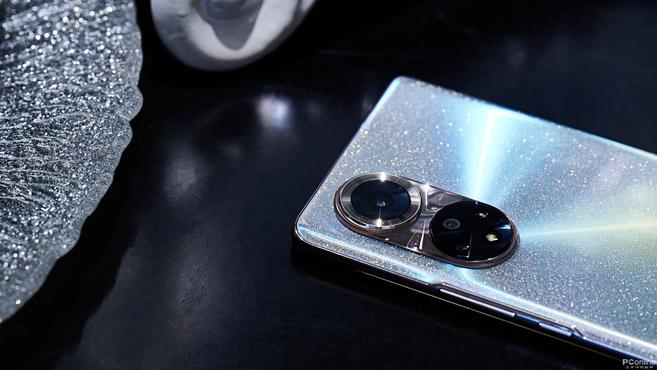
榮耀50 Pro的外觀設計延續了榮耀數字系列的美學基因與技術沉澱,我手上這臺榮耀50 Pro的配色叫做「初雪水晶」。從工藝上去進行考究,榮耀50 Pro使用了領先行業的雙膜雙鍍雙紋處
2021-06-17 03:00:30

在預熱許久之後,榮耀終於推出了他們最新的數字系列手機榮耀50系列,該系列擁有榮耀50、榮耀50 Pro和榮耀50 SE這三款產品。儘管三款產品的配置、定價和受眾人群互不相同,但他們
2021-06-16 23:57:19

三星手機在全球範圍內的影響力還是非常高的,旗下的入門和中低端產品,在很多國家有非常高的銷量,同時在品質上也有著不錯的表現。但從目前的市場角度來看,三星應該很難挽回在國內
2021-06-16 23:54:12