魚羊 發自 凹非寺 量子位 報道 | 公眾號 QbitAICVer翹首以盼的CVPR 2021,它來了它來了。本屆CVPR論文錄用率,較去年略有回升,但競爭依然激烈——在7039篇有效投稿中,最終有1661
2021-06-22 20:59:15
魚羊 發自 凹非寺 量子位 報道 | 公眾號 QbitAI
CVer翹首以盼的CVPR 2021,它來了它來了。
本屆CVPR論文錄用率,較去年略有回升,但競爭依然激烈——在7039篇有效投稿中,最終有1661篇中選,錄用率為23.6%。
繼去年華人一作包攬最佳論文、最佳學生論文、經典論文獎之後,今年的CVPR又延續了「華人主場」的氣質:
單看最佳論文獎候選名單,32篇中就有18篇有華人學者參與,足可謂佔據半壁江山。
 圖片
圖片又比如年年霸榜的商湯科技,此番共有66篇論文入選,並且還是學術、產業兩開花的那種,其中還有一篇入選最佳論文候選名單。
入選最佳論文候選名單
照例,我們先來探究一下這份成績單的「質量」。
就先從入選最佳論文候選名單的NeuralRecon: Real-Time Coherent 3D Reconstruction From Monocular看起。
這是一篇三維重建方向的研究。NeuralRecon是首個基於神經網路的單目實時場景三維重建系統。
具體的效果,就像這樣:
 圖片
圖片不同於以往基於深度圖估計與融合的方法,NeuralRecon直接基於影象特徵,預測用TSDF(截斷符號距離函數)表示的局部三維表面,並創新地提出了一個聯合TSDF重建與融合框架。
 圖片
圖片這樣做的好處是,可以讓網路學習到三維表面在局部和全局上的平滑先驗,使得最終的重建結果準確且具有很好的一致性。
實際上,三維重建是實現沉浸式AR效果的基礎。而NeuralRecon這種基於單個攝像頭拍攝的視訊,實時進行三維重建的方法,就為AR在普通智慧手機上的落地應用打下了理論基礎。
要知道,為了在手機、平板等裝置上實現更好的AR效果,蘋果甚至用上了鐳射雷達這樣的感測器。現在有了NeuralRecon,即使是普通的智慧手機,也能實現更強大的AR功能。
比如基於NeuralRecon重建的場景,實現這樣的效果:
 圖片
圖片論文連結:https://arxiv.org/abs/2104.00681
以上,還只是商湯這回在CVPR上展示的學術積累的一個方面。
比如,在與自動駕駛息息相關的點雲方面,商湯同樣有一篇論文中選Oral。
在Variational Relational Point Completion Network這篇論文中,研究人員提出了一個兩階段網路,來從殘缺點雲中學習關係型結構屬性,從而恢復可信且高質量的完整點雲形狀。此外,論文還生成了一個豐富的殘缺點雲資料集,可作為點雲補全測試基準。
論文連結:https://arxiv.org/abs/2104.10154
而在影象視訊編碼方面,Checkerboard Context Model for Efficient Learned Image Compression這篇論文創新地提出了棋盤格上下文建模方式,實現了在常用模型上超過40倍的加速。
論文連結:https://arxiv.org/abs/2103.15306
 圖片
圖片除此之外,在同期舉辦的挑戰賽中,商湯-南洋理工聯合實驗室(S-Lab)團隊一舉斬獲CVPR 2021 NTIRE視訊理解挑戰賽三項冠軍,包括視訊超解析度、重度壓縮視訊質量增強(固定量化參數,保真度)和重度壓縮視訊質量增強(固定位元率,保真度)賽道。商湯研究院團隊摘得CVPR 2021 ActivityNet時序動作檢測任務弱監督學習賽道冠軍。
一窺商湯應用佈局
話至此處,可見在這屆CVPR上,商湯這個「演算法工廠」仍然延續了全能的風格。
並且在此次入選CVPR的論文中,不僅能看到商湯在各個學術領域的投入,還能一窺從自動駕駛到智慧城市,乃至在手機等諸多應用領域,商湯的技術佈局。
比如提升屏下相機的成像質量:
 圖片
圖片論文地址:https://jnjaby.github.io/projects/UDC/
又比如在自動駕駛技術上,針對軌跡預測問題,商湯的研究人員引入Transformer,提出了一種基於堆疊式Transformer的端到端軌跡預測框架mmTransformer。既有效減輕了軌跡預測的複雜性,也確保了多模態的軌跡輸出。
 圖片
圖片論文地址:https://decisionforce.github.io/mmTransformer/
而在鐳射雷達的3D目標檢測上,商湯提出了一種名為ST3D的自訓練域適應方法,讓檢測器在用高質量偽標籤訓練的同時,避免對大量簡單樣本過擬合。實驗表明,ST3D在KITTI 3D目標檢測榜上,甚至超過了全監督方法。
論文地址:https://arxiv.org/abs/2103.05346
事實上,圍繞汽車智慧化這個時下最熱的產業命題,商湯近來可謂落子頻繁。
在今年的上海國際車展上,商湯的SenseAuto智慧汽車解決方案正式亮相,而結合SenseAuto展現的能力和商湯的CVPR論文,便可看出商湯佈局自動駕駛的獨特之處——
依靠長期以來在感知技術上的沉澱和積累,一口氣打通車內車外,從艙內對駕駛員的感知,到艙外的自動駕駛系統,形成一站式解決方案。
 圖片
圖片另外,說到技術落地,就要提及商湯一直以來關注的另一個重點——長尾問題。
同樣,此番也有論文體現。如LVIS Challenge 2019&2020 冠軍團隊的長尾目標檢測演算法Equalization Loss v2,從梯度的角度提出了一種統一的視角來分析長尾問題,並已開源。
論文地址:https://arxiv.org/abs/2012.08548
其實無論是在防火、防水這樣的智慧城市應用場景中,還是在複雜道路行駛的自動駕駛場景中,長尾問題一直是困擾著AI模型的一個技術難點。
 圖片
圖片畢竟再怎麼精心調教,看似達到了高精度的模型們,總是會在現實場景中被訓練時未曾遇見的情況困住。
商湯也在多年的實踐中認識到,一對一精細打磨的模型難以應對長尾問題,反而是簡單粗暴地用上大資料+大模型+強算力,「眉毛頭髮一把抓」,更能解決AI商業化落地中的這個老大難問題。
而這,其實也就是商湯為什麼能在CVPR這樣的頂會上多點開花的技術祕籍。
商湯祕籍:AI大裝置
無論是SenseAuto還是解決長尾問題的「大力出奇跡」,據商湯聯合創始人林達華透露,幾乎都是在商湯AI大裝置的基礎上進行的。
什麼是AI大裝置?
其實就是商湯在過去幾年中,投資56億打造大資料+大模型+超強算力的人工智慧基礎設施,包括AI算力中心(AIDC)、演算法訓練平臺SenseParrots和資料處理平臺,以及面向社群的開源演算法模型框架OpenMMLab、面向企業的開放演算法模型工廠SenseSpring。
 圖片
圖片至於AI大裝置給商湯帶來了什麼,林達華也做了進一步的解釋:
從技術突破這個角度來說,人工智慧大裝置的一個重要意義就是,它為人工智慧的技術研發提供了關鍵的算力支撐。在這個基礎設施之上,人工智慧大裝置還提供了豐富的工具和技術元件,能幫助研究員進行快速的試錯,他們能夠快速地實驗很多新的想法。這樣一來,很多有價值的新技術、創新想法就都出來了。
可以說,商湯多年以來在CVPR等頂會上展現的研發、創新能力,在今天沉澱成為了AI大裝置的形態。而反過來,AI大裝置也進一步加速了研發人員實現想法創意、凝結技術成果的過程。
 圖片
圖片林達華談到,在現在這個階段,人工智慧的一些簡單的基礎問題都已經解決了,AI的進一步發展,就是要深入到更廣泛的行業裡面。
但這也就意味著,成千上萬的具體問題正在浮出水面,人工智慧如果沿著過去那種「具體問題具體攻破」的路徑接著走,是很難真正更深化地實現落地的。
這個時候,整個行業需要通用性更強的模型。
而像GPT-3、AlphaFold這樣的代表性成果,就指出了一條可行的路徑:大參數模型,能夠帶來完全不一樣的革命性的變化。
這也就是商湯要重金押注AI大裝置的意義所在。
一方面,對於未來10年的人工智慧發展,構建起基礎設施。
另一方面,當越來越多的人才投入到AI演算法研發領域,AI大裝置這樣的基礎設施,將隨著技術的開源開放,逐漸從企業內部平臺,演變成面向整個生態、整個社群的具有公共性質的設施。
不僅僅是對商湯而言,對於整個AI產業而言,人才+生態+技術,或許正是推動AI進入工業化發展階段,真正高效率、低成本賦能百業的關鍵所在。
現在,商湯CVPR 2021的成績單,就是對AI大裝置路徑的一次有力驗證。
「大力出奇跡」在未來還能給AI領域帶來怎樣的驚喜,由此看來值得持續期待。
你覺得呢?
相關文章

魚羊 發自 凹非寺 量子位 報道 | 公眾號 QbitAICVer翹首以盼的CVPR 2021,它來了它來了。本屆CVPR論文錄用率,較去年略有回升,但競爭依然激烈——在7039篇有效投稿中,最終有1661
2021-06-22 20:59:15

儘管近年來我國在半導體技術方面進步不小,但在很多晶片細分領域仍然受制於人,例如MCU晶片。所謂MCU晶片,指的是微控制單元,可以將CPU頻率與規格進行適當縮減,同時還能起到將記憶
2021-06-22 20:58:17
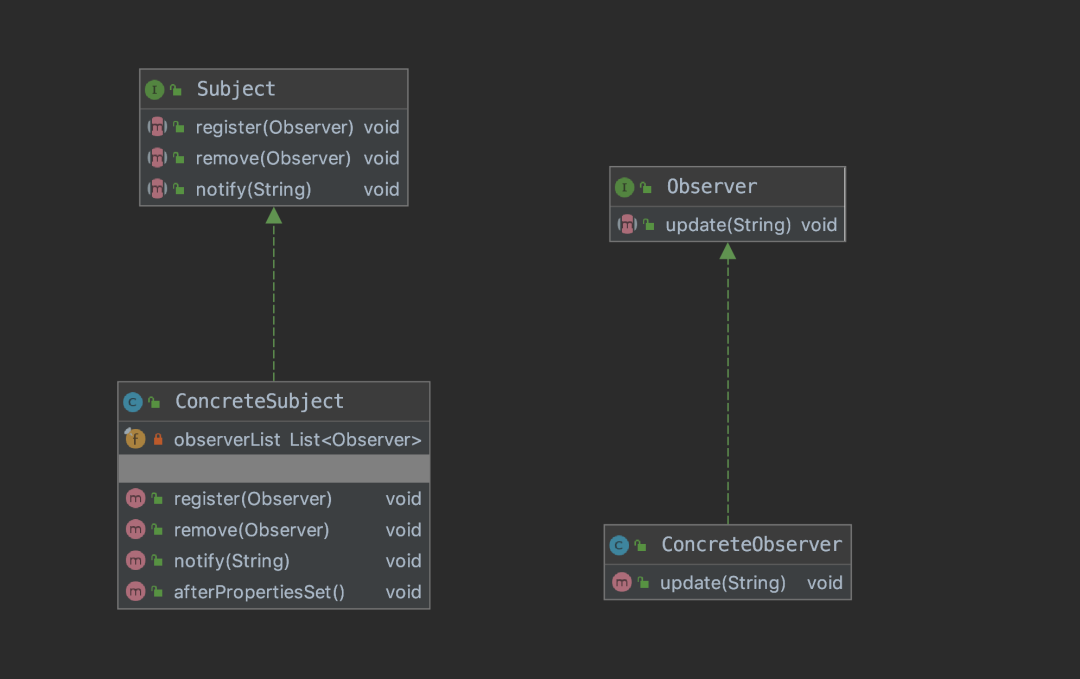
【CSDN 編者按】總結:靈活解耦、業務分離、單一責任、已維護,那麼就可以使用觀察者模式了。 作者 | 龍臺 責編 | 歐陽姝黎 前言 《設計模式實戰》系列目前已經寫了 7 篇
2021-06-22 20:39:57

看了魅族618「這次一定」功能點評優大賽,你有沒有被種草?反正筆者我是入坑了,只怪魅族18系列太搶眼!魅族18系列是魅族今年年初推出的一款旗艦機,它的第一個亮點就是小屏。在眾多
2021-06-22 20:39:28

618大戰剛剛過去,很多手機都彈回原價。外加之前歷史最低價的映襯,導致現在買手機的心情,就像看著末班車走過一樣酸楚。但有得騙自己:生活總是要繼續的啊。本文統一使用京東官方
2021-06-22 20:39:01

——OPPO今日正式以理事會白金會員身份加入LF AI & Data基金會。未來,OPPO將與其他高階成員一道,致力於構建領先的全球人工智慧與資料開源開放社群,加速人工智慧與資料技術的創
2021-06-22 20:38:47