機器之心專欄作者:汪寧非來自加州大學爾灣分校(UC Irvine)的研究者發現,L4 自動駕駛裡用的最廣泛的用來提高系統魯棒性的多感測器融合感知(Multi-Sensor Fusion based Perception
2021-06-23 15:29:54
機器之心專欄
作者:汪寧非
來自加州大學爾灣分校(UC Irvine)的研究者發現,L4 自動駕駛裡用的最廣泛的用來提高系統魯棒性的多感測器融合感知(Multi-Sensor Fusion based Perception)技術存在一個安全漏洞,使得攻擊者可以 3D 打印出一個惡意的 3D 障礙物,放在道路中間,從而讓自動駕駛車輛的 camera 和 LiDAR 機器學習檢測模型都識別不到。這項研究已經正式發表在電腦保安四大頂會之一 IEEE S&P 2021。
在自動駕駛系統裡,「感知」實時周圍物體是所有重要駕駛決策的最基本前提。感知模組負責實時檢測路上的障礙物,比如周圍車輛、行人、交通錐 (雪糕筒)等等,從而避免發生一些交通事故。當前,L4 自動駕駛系統逐漸商業化,其普遍採用多感測器融合的設計,即融合不同的感知源,比如鐳射雷達(LiDAR)和攝像頭(camera),從而實現準確並且魯棒的感知。
在這樣的設計中,根據「並非所有感知源都同時被攻擊(或可以被攻擊)」這一假設,總是存在一種可能的多感測器融合演算法,可以依靠未被攻擊的源來檢測或防止單感知源攻擊。這個基本的安全設計假設一般都是成立的,因此多感測器融合通常被認為是針對現有無人車感知攻擊(單感知源攻擊)的有效防禦策略。
來自加州大學爾灣分校(UC Irvine)的研究者發現,在識別現實世界中,這種多感測器融合的障礙物感知存在漏洞。通過這個漏洞,可以同時攻擊不同的感知源,或者攻擊單個感知源(只有 LiDAR 或者 camera 的檢測),使得無人車無法成功檢測前面的障礙物並直接撞上去。

論文連結:https://arxiv.org/pdf/2106.09249.pdf
在這項工作中,我們首次對當今無人車系統中基於多感測器融合的感知進行了安全分析。直接挑戰了上述基本的安全設計假設,證明了「同時攻擊自動駕駛多感測器融合感知中所有感知源」的可能性。這使我們第一次具體瞭解到使用多感測器融合作為無人車感知的一般防禦策略能提供多少安全保障。
具體而言,我們發現惡意 3D 障礙物可以被用作針對基於多感測器融合的無人車感知的攻擊載體,同時具有有隱蔽和物理上可實現的特點。3D 障礙物的不同形狀可以同時導致 LiDAR 點雲中的點位置變化和 camera 影象中的畫素值變化,因此攻擊者可以利用形狀操作,同時向 camera 和 LiDAR 引入輸入擾動。這樣的攻擊載體還有另外兩個優點:
(1) 它很容易在物理世界中實現和部署。例如,攻擊者可以利用 3D 建模構建這類障礙物,並進行 3D 列印。目前市面上有很多線上 3D 列印服務,攻擊者甚至不需要擁有 3D 列印裝置;
(2) 它可以通過模仿能合法出現在道路上的正常交通障礙物,如交通錐或障礙物(如石頭),並偽裝為比較常見的磨損或破損的外觀,實現高度隱蔽性(如圖 1)。

圖1:生活中路面可能出現的形狀奇怪或破損的物體
為了使其既容易部署又能造成嚴重的碰撞,攻擊者可以選擇較小的障礙物,如岩石或交通錐,但用花崗岩甚至金屬填充,使其更硬更重。例如,一塊 0.5 立方米的石頭或一個 1 米高的交通錐,裡面填充一些鋁,很容易超過 100 公斤,如果汽車在高速行駛時撞到,有底盤損壞、撞碎擋風玻璃甚至失去控制的風險。另外,攻擊者還可以利用某些道路障礙物的功能(如交通錐作為標識的功能)。例如攻擊者可以設計一種僅針對無人車的攻擊,將釘子或玻璃碎片放在生成的惡意交通錐障礙物後面,這樣,人類駕駛員能夠正常識別交通錐並繞行,而無人車則會忽視交通錐然後爆胎。在這裡,安全損害並不是需要由碰撞交通錐體本身造成的,因此在這種情況下,惡意的交通錐體可以像普通交通錐體一樣小而輕,以使其更容易 3D 列印、攜帶和部署。
為了評估這一漏洞的嚴重性,我們設計了 MSF-ADV 攻擊,它可以在給定的基於多感測器融合的無人車感知演算法中自動生成上述的惡意的 3D 障礙,創新性設計可提升攻擊的有效性、魯棒性、隱蔽性和現實生活中的可實現性(如圖 2)。我們選擇了 3 種障礙物類型(交通錐、玩具車和長椅)進行測試,並在真實世界的駕駛資料上進行評估。我們的結果顯示,在不同的障礙物類型和多感測器融合演算法中,我們的攻擊實現了 >=91% 的成功率。
我們還發現,我們的攻擊是(1)基於使用者研究,從駕駛者的角度看是隱蔽的;(2)對不同的被攻擊車的位置和角度具有魯棒性,平均成功率 > 95%;(3)製作出來的惡意的 3D 障礙物可以有效轉移並用於攻擊其他 MSF 演算法,平均轉移攻擊成功率約 75%。

圖 2:基於優化的惡意的 3D 物體生成概述。
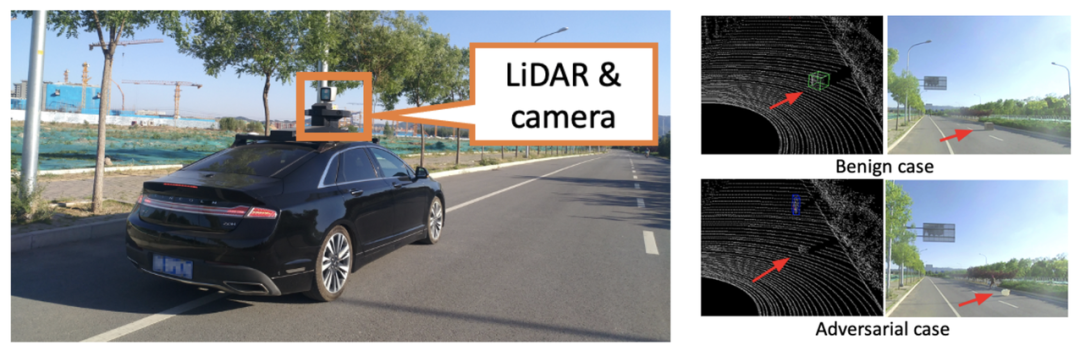
為了瞭解攻擊在物理世界中的可實現性和嚴重性,我們 3D 列印了生成的惡意障礙物(圖 3),並在使用了多感測器融合感知得真車上進行評估。圖 4 是我們使用的裝配了 LiDAR 和 camera 的測試車輛。我們發現惡意的障礙物可以在總共 108 個感測器幀中的 107 幀中(99.1%)成功躲過多感測器融合的檢測。在一個微縮模型的實驗環境中(圖 5),我們發現我們的惡意的障礙物在不同的隨機抽樣位置有 85-90% 的成功率逃避多感測器融合感知的檢測,而且這種有效性可以轉移。

圖 3: 3D 打印出來的惡意障礙物

圖 4: 安裝 LiDAR 和 camera 的真車設定和檢測結果 (攻擊演示視訊:_https://www.youtube.com/watch?v=N96L53bIPdM&list=PLlViq2qGRmiZDEmwS4cwfMI5dX3c97Efo&index=3_ )

圖 5: 微縮模型的實驗環境和檢測結果 (攻擊演示視訊:_https://www.youtube.com/watch?v=VLUW6yqyGKo&list=PLlViq2qGRmiZDEmwS4cwfMI5dX3c97Efo&index=2_ )
為了瞭解端到端的安全影響,我們使用產品級的無人車模擬器 LGSVL 進一步評估 MSF-ADV(圖 6)。在 100 次運行中,我們的惡意的交通錐對 Apollo 的無人車造成 100% 的車輛碰撞率。相比之下,正常交通錐體的碰撞率為 0%。

圖 6: Apollo 和 LGSVL 在端到端攻擊評估的截圖 (攻擊演示視訊:_https://www.youtube.com/watch?v=ph4FppYVc5U&list=PLlViq2qGRmiZDEmwS4cwfMI5dX3c97Efo&index=4_)
多感測器融合不是自動駕駛安全的萬全之策
這項研究的主要貢獻是讓大家意識到多感測器融合感知同樣存在安全問題。很多前人工作事實上把多感測器融合當做對於單個感測器攻擊的有效防禦手段,但是之前卻並沒有文章去系統性的探究這一點。我們的工作填補了這一個關鍵的知識空白,證明其實並不完全是這麼一回事。我們生成的 3D 惡意的障礙物可以讓多感測器融合感知系統失效,從而導致無人車撞到這種物體上並造成交通事故。
我們認為比較切實可行的防禦手段是去融合更多的感知源,比如說更多的不同位置的 camera 和 LiDAR,或者考慮加入 RADAR。但是這不能從根本上防禦 MSF-ADV,只能是說讓 MSF-ADV 生成過程更加困難。我們已經就這個漏洞聯絡了 31 家自動駕駛公司,同時建議它們應用這些緩解手段。我們覺得不論是研究者還是自動駕駛公司都需要投多更多精力去系統性地探究自動駕駛裡的的安全問題。
其他問題:
為了實現同樣的攻擊目標,為什麼攻擊者不能直接向無人車扔石頭或者直接在無人車前面放釘子或玻璃碎片?
我們是電腦保安研究人員,所以我們的目標是研究特定於計算機技術(在我們的例子中指的是自動駕駛)的安全漏洞。我們的最終目標是在計算機技術層面修復它們。扔石頭、放釘子或玻璃碎片並不是針對於無人駕駛這種特定技術的攻擊,非無人駕駛車輛也會受到損害,同時這樣的研究也無助於暴露出無人駕駛技術中的安全隱患相比之下,我們的惡意的障礙物可以被人眼正確識別出來,但無人車系統卻無法正確識別,這個才是我們需要研究的技術問題。通過發現和解決此類問題,無人車技術可以更好地接近人類駕駛的水平和效能,從而實現無人車技術的最終目標:代替人類駕駛。
一般車上都有的緊急剎車系統可以防禦這種攻擊嗎?
緊急剎車系統可以減輕它的的風險,但既不能完全防止此類攻擊,也不能消除防禦攻擊的需要。首先,無人車系統必須設計為能夠自行處理儘可能多的安全隱患,而不是完全依賴緊急剎車系統。緊急剎車系統僅設計為緊急情況或者備用安全保護措施;_它永遠也不應該用來代替無人車警覺性_ (https://www.motortrend.com/news/automatic-emergency-braking/)。就像司機駕駛一樣,沒有人完全依賴緊急剎車系統來確保安全;我們必須始終保持謹慎並儘可能的主動做出安全決策,然後僅依靠緊急剎車系統作為在極端情況下盡力而為的後備保護。因此,我們必須要想辦法在無人車系統級別上解決這種漏洞。
其次,現如今的無人剎車系統本身際上遠非完美,並且可能具有很高的漏報率。例如,_AAA 報告稱,很多車(例如雪佛蘭邁銳寶、本田雅閣、特斯拉 Model 3 和豐田凱美瑞)的緊急剎車系統故障率為 60%_ (https://www.zdnet.com/article/does-your-car-have-automated-emergency-braking-its-a-big-fail-for-pedestrians/)。此外,即使無人車的緊急剎車系統能夠成功緊急停車,但是也無法避免無人車被後面的車追尾。
我們有對無人車公司進行漏洞報告嗎?他們是怎麼答覆的?
截至 2021 年 5 月 18 日,我們對 31 家開發或者測試無人車的公司進行了漏洞報告,其中 19 家(約 61%)已經回覆了我們。根據答覆,大多數公司目前都在調查它們是否會受到影響以及受到的影響程度。有些公司已經與我們開會討論他們的調查。
本次研究作者團隊,來自加州大學爾灣分校、密西根大學安娜堡分校,亞利桑那州立大學,伊利諾伊大學厄巴納 - 香檳分校,英偉達 Research,中國百度深度學習技術與應用研究和國家工程實驗室,嬴徹科技,一共有 9 名研究人員。四位同等貢獻第一作者來自加州大學爾灣分校,密西根大學安娜堡分校,亞利桑那州立大學和英偉達 Research,分別是 Ningfei Wang, Yulong Cao, Chaowei Xiao 和 Dawei Yang。三位教授分別是 Qi Alfred Chen, Mingyan Liu, Bo Li。以及兩位來自於百度和嬴徹科技的研究人員,分別是 Jin Fang 和 Ruigang Yang。
相關文章
機器之心專欄作者:汪寧非來自加州大學爾灣分校(UC Irvine)的研究者發現,L4 自動駕駛裡用的最廣泛的用來提高系統魯棒性的多感測器融合感知(Multi-Sensor Fusion based Perception
2021-06-23 15:29:54

金磊 發自 凹非寺量子位 報道 | 公眾號 QbitAI去年,一款像Windows一樣的AI作業系統——Sage AIOS,橫空出世。而時隔10個月,這個AI作業系統便迎來了它的大升級,正式步入2.0時代。
2021-06-23 15:29:47

距離iOS 15首個測試版釋出已經過去了半個多月的時間,這段時間內,有使用者表示無法忍受當前iOS 15系統的Bug,已經早早儲存資料降級回了iOS 14.6系統,而不少使用者則還在繼續堅持
2021-06-23 15:29:14

夏至過後,全國多地開啟高溫模式,北京、河北、山東等地陸續釋出高溫預警訊號,部分地區最高氣溫已經超過35攝氏度。氣象部門預測,今年夏天全國範圍內將會存在普遍高溫的現象。
2021-06-23 15:28:59

作為全球代工巨頭,臺積電的一舉一動受到了全球晶圓廠商的關注。繼率先生產先進的7nm、5nm工藝之後,業內人士對於臺積電3nm工藝的量產相當期待。據6月18日媒體的訊息:如今臺積電
2021-06-23 15:28:47
如今的華為和榮耀手機已經分家,花粉也是如此,分為了華為手機的花粉,榮耀手機的花粉,以此來進行劃分市場。不過,在榮耀手機獨立出來之前,華為曾經承諾會給升級到榮耀Magic UI4.0的
2021-06-23 15:28:38