大資料文摘授權轉載自機器人大講堂倒立、跑酷、360度轉體、踢足球,人形機器人的發展是越來越逆天了。在這些逆天的動作下,機器人的設計其實有很多講究。為了提高人形機器人的
2021-06-28 08:31:07

大資料文摘授權轉載自機器人大講堂
倒立、跑酷、360度轉體、踢足球,人形機器人的發展是越來越逆天了。

在這些逆天的動作下,機器人的設計其實有很多講究。
為了提高人形機器人的動態效能,它們需要一種剛性結構和質量慣性特性的最優分佈。
這是什麼意思呢?打個比方,如果兩個機器人的身高都是1米8,那麼體重更輕那個,由於慣性減少,可以更輕鬆的完成運動範圍,也就是「更靈活」。

最近,德國人工智慧研究中心開發了一款人形機器人RH5,其高2m,重量僅為62.5kg,這比多數只有1.5米高的人形機器人的體重還要輕,不僅如此,RH5每隻手都可執行5公斤有效載荷的重型動態任務。

突破體重大關——串並聯混合設計
要想讓人形機器人「更輕」「更靈活」,剛性結構的設計很關鍵,常見的幾種剛性結構設計有以下幾種:

串聯和樹型結構在機械臂中非常常見,功能性多、工作空間大、建模和控制都很簡單,然而,該結構建造的人形機器人往往很笨重,通常受到速度和力/扭矩的限制。
並聯結構的人形機器人可以提供更高的剛度、速度、精度和有效載荷能力,但工作空間卻相對減少,結構設計複雜,且需要仔細分析和控制。
RH5機器人受人類關節的結構啟發,利用了串並聯混合設計,該設計結合了串聯和並聯結構的優點,可以大大減輕其重量,提高其結構剛度和動態特性。
機器人的設計比例與人類很接近,渾身上下共有34個DOF,連續排列的旋轉執行器可以增加運動範圍,對於運動範圍小的關節,例如踝關節,研究人員還添加了側傾和俯仰運動,具有良好的扭矩-速度特性,同時最大限度地減少整體重量和腿部慣性,可以輕鬆實現類人運動範圍。


說到這,小編想起之前介紹過的人形機器人TORO,同為德國公司出品,它具有良好的路況動態步行能力,但其小腿設計使用了串聯結構,RH5 機器人的踝關節可以為提供比 TORO 踝關節更好的最大速度和扭矩,而不會影響運動範圍;同時,RH5小腿的重量是TORO小腿重量的一半,僅有2.3kg,而兩條小腿的長度幾乎相等。


全身軌跡優化演算法,穩定性提升Get!
RH5串並聯混合的結構可以讓機器人減輕重量,提高動態特性,但同時這也是一個高度複雜的機電系統,此類機器人的通用處理仍然是一個懸而未決的問題,建模深度和準確性與計算效率之間總是存在權衡。
為此,研究人員提出了一種改進的接觸穩定性軟約束DDP演算法,對機器人進行分析和控制,這是一種基於微分動態規劃的全身軌跡優化技術,能夠生成物理一致的人形行走軌跡,並通過物理模擬器中的簡單PD位置控制來跟蹤。

RH5機器人採用了一種混合控制方法,由於機器人有多個平行的關節模組,運動控制可以以完全分散的方式實現,它結合了局部的低階電機控制和中央控制器的高階控制,從而實現具有低延遲的本地控制迴路。
來看看RH5人形機器人的初步實驗結果,穩定性表現非常不錯!
單腳擡起的穩定性:

做一組膝蓋關節運動:

目前,研究人員只對RH5人形機器人進行了簡單的測試,一起期待它未來更精彩的表現吧!
【參考連結】
https://arxiv.org/abs/2101.10591
https://www.youtube.com/watch?v=jjGQNstmLvY
相關文章

大資料文摘授權轉載自機器人大講堂倒立、跑酷、360度轉體、踢足球,人形機器人的發展是越來越逆天了。在這些逆天的動作下,機器人的設計其實有很多講究。為了提高人形機器人的
2021-06-28 08:31:07

熱門手機數碼資訊早知道,快來關注作者。編輯|孫鳳新稽核|文崢近日,網路上曝光了小米12的相關硬體參數,據悉全新小米12將首發高通驍龍895處理器,螢幕升級為LTPO螢幕,支援多檔變速智
2021-06-28 08:11:24
據稱華為規劃在武漢建設的晶片製造廠已到了後期,預計明年就將投產,凸顯出這家企業在面臨沒有代工廠為它生產晶片的情況下,直接出手自行建設晶片製造工廠,解決晶片製造問題。在過
2021-06-28 08:11:02

Windows 11 最初的「軟」、「硬」最低要求顯示,支援 TPM 1.2 或者更老的裝置都可以升級。隨後,微軟悄然更新了 Windows 相容性支援檔案,在最低硬體要求中確認對 TPM 2.0 和較新
2021-06-28 08:09:19

同一個事,怎麼就是不同的結果?國家將積體電路作為一級學科,去年南京也率先成立晶片大學,從這一點上也能夠看得出人才培養的重要性,而國內到了2025年積體電路相關人才還將缺30萬人
2021-06-28 08:08:39
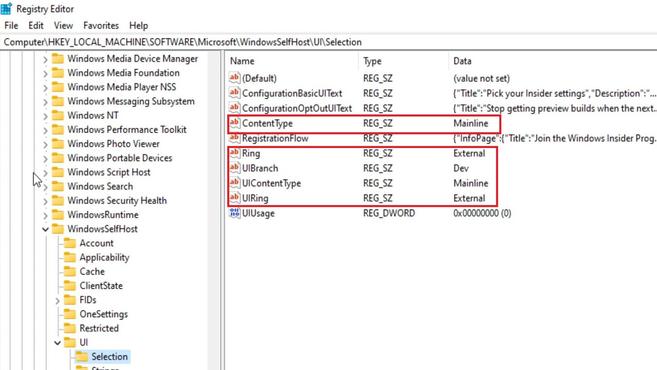
IT之家 6 月 28 日訊息 微軟上週正式釋出了全新的 Windows 11 作業系統,並將在本週一(美國時間)推送 Insider Preview 預覽版,之後在聖誕節期間推出正式版且在明年支援升級。感
2021-06-28 08:08:22