編者按:過去兩年裡,國內 Robotaxi 的公開運營多點開花,這些 Robotaxi 所搭載的自動駕駛系統也都具備了處理常見場景的能力,比如識別紅綠燈、避讓行人、變道超車等——在這種背景
2021-06-29 08:53:24
編者按:過去兩年裡,國內 Robotaxi 的公開運營多點開花,這些 Robotaxi 所搭載的自動駕駛系統也都具備了處理常見場景的能力,比如識別紅綠燈、避讓行人、變道超車等——在這種背景下,零接管似乎已經成為行業發展的硬通貨。
針對這種頗有「唯接管次數論英雄」意味的現象,新智駕與近 10 位業內資深人士交流探討,基於五個重要角度,梳理出了他們眼中一個優秀自動駕駛系統該有的樣子。
有人說,從五年前驚豔眾人的 demo 頻現到整個行業的務實派作風蔓延,自動駕駛發展的第二波熱潮已經到來。
也有人說,從感知規劃決策演算法的拼殺到 Robotaxi 公開運營的多地開花,今年將是自動駕駛落地至關重要的元年。
儘管這些說法都尚未有定論,但可以看到,眼下幾乎所有自動駕駛系統都具有了處理常見場景的能力,比如識別紅綠燈、避讓行人、變道超車等。
不過,作為外界瞭解這一行業發展的重要視窗,業界相關報道的關注重心大多還是放在路況、天氣、車輛基本配置(鐳射雷達、攝像頭、車型)以及安全員的接管次數等,內容同質化較為嚴重。
這些資訊固然重要,行業的程序也值得欣喜。同時,我們或許也該思考:
行業親歷者和見證者的姿態來看,我們該如何去評判一個自動駕駛系統優秀與否?是不是有更多深層次的內容等待我們去挖掘,而不是唯接管次數論英雄?
在自動駕駛技術走向落地的關鍵階段,長尾場景也已成為各個玩家繞不開的話題。目前道路上自動駕駛所遇到的或可能遇到的主航道問題是否已經全部解決?
針對這些問題,新智駕從自動駕駛技術公司、主機廠、Tier 1、使用者的角度出發,與近 10 位業內資深人士交流探討並總結了以下五個維度。
可能無法全面陳列出一個優秀自動駕駛系統應該具備的所有能力和特徵,但也足以從中窺見一二。
近兩年,面向公眾開放的 Robotaxi 運營服務如雨後春筍般在國內多個城市落地,看似遙遠的自動駕駛技術開始走近使用者的生活,人工接管次數無疑成了影響使用者體驗最為直觀的指標。
目前開放給媒體試乘的自動駕駛車輛都有固定的行駛路線,技術公司基於這些路線已經做了大量測試,而接管的本質就是車輛駕駛控制權從「機器」到「人類」。
在這種語境下,零接管似乎成為了行業硬通貨。
正如 AutoX 相關負責人所指出的,使用者試乘情況下仍發生人工接管則說明是大概率事件,而常見交通場景的穩定處理是成熟自動駕駛系統的基本素養。
誠然,接管次數與技術安全性有著緊密的聯絡,而且只有做到不依賴安全員以及任何形式的人工直接干預,自動駕駛技術才能帶來更大的商業價值。
但需要注意的是,人工接管並不能簡單與自動駕駛技術不成熟劃上等號,接管率也不可當作評價自動駕駛系統優秀與否的唯一標準。
曾作為自動駕駛行業風向標的《自動駕駛脫離報告》,近年開始受到越來越多的爭議。這份報告由加州車管局(DMV)釋出,試圖通過接管次數等指標對各大自動駕駛玩家的實力進行排位。
然而,爭議點之一就在於:
運行場景的客觀複雜性,甚至是安全員的主觀判斷,都可能會影響到人工接管的次數。
"目前媒體試乘體驗中所提到的「零接管」更多是指 PR 層面的零接管。"某自動駕駛公司相關負責人告訴新智駕。
如果是非媒體試乘環節(比如研發測試階段),玩家們可能會更傾向於選擇更加複雜的場景去磨鍊系統--測試的意義就是找問題,不斷找問題解決問題才能推動系統進入穩定迭代期。
福瑞泰克相關負責人則提到了 ODD(Operational Design Domain,設計運行域)場景的重要性:
"由於行業絕大多數人還是在談 L4 及以下的系統,並不是在空談 L5,談零接管就必須要與 ODD場景相結合。"

根據 SAE J3016 標準的定義,即使是 L4 級自動駕駛,在超出 ODD 場景時,人類駕駛員也需要進行接管操作。
因此,在不同場景下,哪怕是同一個自動駕駛系統的接管次數也可能出現巨大差異,脫離場景談零接管的意義不大。
另一方面,接管次數或許能較大程度反映出系統的可靠性,但評定自動駕駛系統的效能還有其它重要維度,僅靠接管次數無法客觀公正地衡量。
長尾場景,已經成為了業內討論自動駕駛發展現狀時繞不開的一個話題。
玩家們通常將其理解為一切突發的、低概率的、不可預知的場景,比如交通訊號燈故障的路口、醉駕的車輛等。
包括小馬智行在內的多位受訪者表示,這些場景處理難度大,是實現自動駕駛乃至於完全無人駕駛必須要解決的關鍵問題,也是體現一家公司技術水平的重要因素。
不過,目前業內並沒有一個量化的、直觀的評估體系來幫助行業理解自動駕駛系統的長尾場景處理能力。
從開發者的角度來看,福瑞泰克認為構建這麼一個評估體系非常重要,主要可以從兩部分切入:
第一部分是建立已知典型場景的場景庫,這些典型場景庫是對現有已知危險場景的高度概括。通過對自動駕駛系統在這些典型場景中的效能評價,能夠在一定程度上評估自動駕駛系統的長尾場景處理能力。
第二部分是通過大規模的實車道路行駛(可以是路試或者是眾包)的場景採集以及模擬和資料回灌等方式,對系統在面臨未知危險場景的效能進行評估。
在不斷的測試、評估、迭代的迴圈下,許多原先被認為是長尾場景的情況可以逐漸被解決,變為日常可處理的複雜場景,最終成為系統可輕鬆處理的普通場景,同時系統的泛化能力也得到增強。

自動駕駛應對漂浮在路中央的氣球
有意思的是,在自動駕駛系統走向成熟乃至實現真正完全無人駕駛的過程中,不同玩家對於長尾場景的處理有著不同的思考。
有觀點認為,技術解決問題的過程應該是循序漸進的,目前道路上自動駕駛所遇到的主航道問題(包括已知的危險場景)還遠遠沒有全部解決,應該把精力和時間重點放在這一部分。而長尾場景,也就是那些未知的危險場景,還不是現階段自動駕駛面臨的主要問題。
另一種聲音則表示,技術方應該同時注重覆蓋道路上的主航道問題以及最後 1% 的長尾問題。如果將主航道場景和長尾場景的處理排上先後順序,很容易從一開始就陷入「錯誤的假設」中,這樣的研發思路可能會在後期遇到瓶頸。
不過,受訪者無一例外都提到了虛擬模擬測試對於長尾場景處理的重要性。
為了窮盡自動駕駛系統可能會遇到的各種場景,保證系統的安全可靠,玩家們對於長尾場景的處理任重道遠。
架構,不是一項單純的技術也不是一類具體的零部件,而是一種頂層設計。
就像是維持一個國家正常運轉所需的基本社會制度和發展規劃,架構體現的則是一個系統裡的實體及其之間的關係。
從宏觀角度來說,自動駕駛技術的實現無法跳脫出以下三大核心流程:
環境感知定位。包括攝像頭和鐳射雷達等環境感知硬體、衛星定位和慣導定位相關裝置、V2X系統);
決策規劃。包括基於高精度地圖的路徑規劃、也包括基於交通參與者行為預測以及自動駕駛行為的決策;
執行控制。涉及 CAN 資料匯流排、油門、制動、轉向等。

從細節層面來說,玩家們在設計/優化自動駕駛架構時也有很多需要考慮的因素。
譬如哪些任務應該由系統自主完成?計算資源如何分配?哪些事情又是被明令禁止的?
譬如怎樣對感測器、計算平臺等硬體裝置進行選型以及佈局?各類感測器與整車的協同怎麼去實現?安全冗餘怎麼保障?
可見架構對於自動駕駛系統的重要意義。
換言之,優秀的架構足以支撐更好的軟體迭代、保證成本、效能、功能等的平衡,強化系統的演進性和拓展性——這也是很多自動駕駛玩家非常重視系統架構的原因。
小馬智行相關負責人告訴新智駕,為了能夠讓車輛能夠順利地完成自動駕駛任務,小馬智行已經結合車輛本身,在軟硬體各個模組中都加入了冗餘設計;同時,基於不同硬體感測器之間的協同,為系統提供時空同步的資料,以便於更安全地車輛控制。
福瑞泰克也在提高自動駕駛系統安全可靠方面做了諸多工作,嚴格按照功能安全的開發要求和流程進行產品硬體,軟體的開發;對系統進行全範圍覆蓋的單元測試、模組測試和整合測試,保證系統正常運行。
對於自動駕駛系統架構在不同階段的優化方向,有業內人士也發表了自己的看法:
前期的系統架構設計應該注重軟硬解耦,保證架構開發的靈活性以及軟體的通用性,避免重複開發的問題;在真正研發產品的階段則要支援軟硬一體化,結合軟硬體去做深度優化,從而改善使用者體驗。

不過,正可謂術業有專攻,擅長三電體系開放的公司可能會在自動駕駛演算法層面感到吃力,而精通演算法的公司往往又缺乏專業的汽車開發知識。
站在主機廠的角度,奇瑞相關負責人向新智駕透露:
單個主機廠或 Tier 1 的有限資料不足以支撐自動駕駛演算法的快速迭代進化,然而目前主機廠與Tier 1 的合作還較大層面上停留傳統的方式上,雙方應該探索新的互利共贏的合作模式。
如果說以上三大維度凸顯的是自動駕駛系統的硬實力,是保障車輛安全順利地完成自動駕駛任務的前提。
那麼,自動作業能力就是軟實力,是差異化服務的重要體現、是提升使用者體驗的關鍵。
正在積極佈局無人小巴的宇通相關負責人表示,
「自動作業能力可以理解為類似於人類司機的服務能力,比如人類司機不僅開車還需要處理各種情況,比如車內有人摔倒了,系統要進行識別處理。」
奇瑞也持有相似的觀點——良好的人機默契合作,使用者會有安全的用車心理體驗。
使用者體驗是從「人」出發的、實際應用時產生的主觀感受,因此使用者的心理安全應該充分被考慮。
除了像老司機一樣做到自然舒適的加減速、正確及時的轉向等駕駛決策,系統還應該通過資訊顯示或其他適當的方式進行人機交流互動。
一些友好的、人性化的人機互動,可以降低或消除使用者使用自動駕駛功能造成的迷惑、緊張、不安等情緒。
具體來說,還可以從以下幾點增進使用者體驗:
幫助使用者理解系統在做什麼,比如互動介面上的資訊顯示,或是車內語音播報;
以平易近人的語言來與使用者進行互動,而不是機械晦澀的語言;
滿足使用者的個性化需求,比如聽音樂、看視訊等;
支援在使用者幫助下自我改進,留有使用者反饋的通道。
總之,自動駕駛發展的實質,到最後都會是安全地完成從 A 點到 B 點的運輸任務,從車輛起步、到自動駕駛、到停車,整個過程是固化的。
在可預見的未來裡,系統的自動化作業能力會越來越重要。
當然,僅僅只是實現完美的自動駕駛效果、帶來愉悅的使用者體驗,這還不夠。
想要讓自動駕駛系統成為一個真正接地氣的、大規模應用的產品,玩家們還要面臨許多看似細枝末節但又舉足輕重的問題。
比如,在大規模生產環節,如何更清晰地掌握硬體的損耗狀態,以至於在正常運行時不會發生故障?
與此同時,在自動駕駛車輛發生極端安全事故之際,如何做好遠端應急措施?
另外,降本一直是橫亙在各大自動駕駛玩家面前的大山。
百度日前已攜手極狐共同釋出了一款共享無人車--Apollo Moon。

據稱成本低至 48 萬,僅為業內 L4 級自動駕駛量產車型平均成本的三分之一,是首款下探至普通量產乘用車價格區間的 Robotaxi 車型。
自動駕駛系統開發費用高、零部件成本高,對於其他玩家來說,如何增強自身的供應鏈整合能力,在不影響系統性能的前提下優化成本?
這些問題的都可能影響到自動駕駛系統快速規模化部署的進度。
自動駕駛技術開始與越來越多的乘客發生緊密勾連,同時給未來出行帶來了無限的想象空間。
回到最初的問題:
究竟什麼樣的自動駕駛系統才能被稱為「優秀」?
由於眾多的不確定性因素,這個問題可能永遠不會出現唯一的高下立判的標準,但有一點可以得出——從比拼技術背景、演算法能力逐步向比拼產品定義、工程速度會是未來主旋律。
或許,市場很快就會給我們最終的答案。
雷鋒網雷鋒網雷鋒網
相關文章

編者按:過去兩年裡,國內 Robotaxi 的公開運營多點開花,這些 Robotaxi 所搭載的自動駕駛系統也都具備了處理常見場景的能力,比如識別紅綠燈、避讓行人、變道超車等——在這種背景
2021-06-29 08:53:24
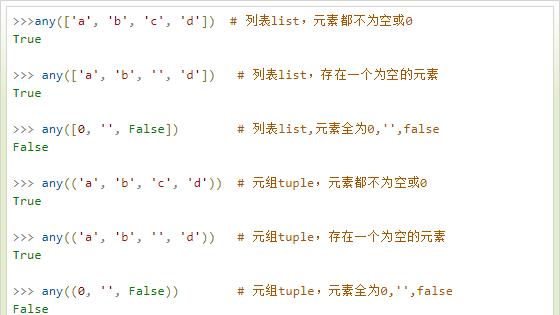
描述any() 函數用於判斷給定的可迭代參數 iterable 是否全部為 False,則返回 False,如果有一個為 True,則返回 True。元素除了是 0、空、FALSE 外都算 TRUE。函數等價於:Python
2021-06-29 08:52:28

不出意外的話,華為P50系列手機將在七月正式釋出。不過真正引發大家關注的是,在華為麒麟9000系列晶片庫存不足之際,華為將在P50系列上如何搭配晶片。之前有不少傳聞就表示華為P5
2021-06-29 08:32:11
【 TechWeb】6月29日訊息,近日港交所釋出資訊顯示,小鵬汽車已通過港交所聆訊,在港上市步入倒計時。小鵬汽車將於6月25日至6月30日招股,預期於7月7日正式在聯交所主機板掛牌上市
2021-06-29 08:30:34

熱門手機數碼資訊早知道,快來關注作者。編輯|孫鳳新稽核|文崢說到高性價比手機,大家第一時間想到的肯定是小米,特別是近期熱銷的Redmi K40系列,以超高的價效比一直深受米粉熱捧。
2021-06-29 08:12:01

紅米Note11Pro的背部設計不再是紅米Note10Pro的設計風格,採用矩陣鏡頭模組,左側三枚鏡頭呈豎排排列,與右側一枚鏡頭組成AI四攝,四枚鏡頭分別是一億畫素主攝+1600萬畫素超廣角+50
2021-06-29 08:11:24